December 2024
TaBuLa-LOGplus research project in Lauenburg/ Elbe 🤖
The TaBuLa-LOGplus research project came to an end at the end of 2024.
In the project, we successfully completed two autonomous transport robots and a control center.
The transport robots were deployed in Lauenburg/Elbe, where they drove autonomously as part of the test operation with public transport buses.
Project partners also conducted scientific analyses on the impact of robot delivery on traffic, the environment and society and developed concepts for operational integration.
The video provides a brief insight into the objectives, implementation and results of the project.
Further information can also be found on the BMDV website or on the project’s own website.
We would like to thank everyone involved in the project and are delighted with the results.
Translated with DeepL.com (free version)
December 2024
Short video about the publication: Using Learning Objective-based Course Modeling for Complete Exercise Generation: From Course Material to an Aggregated Knowledge Representation”/ Deniz Schmidt, Max Uzulis
Digitization is not a trivial process if certain concepts play a role in the analogous origin, especially if they can not be directly seen. Here our research assistant Deniz Schmidt briefly explains why this is the case for digitization of education.
Link to publication: Link

November 2024
🎉 TUHH Christmas Get-Together 🎉 🎅 🎄
After packing surprise bags for refugee kids last week we all headed to a burger place for a laid-back evening with lots of laughs, conversation, and tasty food.
It was a nice way to spend time with colleagues and start the holiday season on a high note. Thanks to everyone who made it so enjoyable!
November 2024
Revolutionizing Intralogistics at Airbus! 🚀📦🛫
🤖 Meet ORCA, our cutting-edge autonomous delivery robot! Developed for Airbus GmbH as part of the ProDiGies Project, in collaboration with Siemens AG, Fraunhofer IFAM, IFPT/TUHH, and DLR.
What is ORCA’s mission?
Seamlessly transporting materials between Hall 9 and Hall 14 at Airbus Finkenwerder in Hamburg.
Backed by Innovation:
Funded by the German Federal Ministry for Economic Affairs and Climate Action, this groundbreaking project started in September 2022 and will run until November 2025.
Why is ORCA a game-changer?
✅ Efficient: Autonomous and fast material transportation at speeds up to 1 m/s.
✅ Reliable: Built on the robust ClearPath Husky platform, equipped with a MonTech conveyor belt for automated handling of KLT containers up to 20 kg.
✅ Safe:
- Comprehensive safety features: reflectors, headlights, taillights, signal lamps, and ISO 3691-4-compliant speed adjustments for human interaction.
- Advanced navigation: 360° LiDAR and stereo cameras ensure collision-free operation, even in tight spaces.
This is smart intralogistics in action! 💡
Stay tuned as ORCA revolutionizes material flow efficiency at Airbus! 🌟
October 2024
🌟 An exchange among experts at the 20th Logistics Colloquium of the WGTL in Dresden 🌟
It was great to take part in this year’s conference of the Wissenschaftliche Gesellschaft für Technische Logistik e.V. (WGTL)! The WGTL provides a platform for the exchange of knowledge and experience between scientists, researchers and practitioners, building a bridge between theory and practice.
This year, we had the pleasure of welcoming the colleagues of Prof. Dr.-Ing. habil. Thorsten Schmidt at the Faculty of Mechanical Engineering in beautiful Dresden. In addition to the many exciting ideas of our colleagues from the chairs of Technical Logistics, we can look back on many interesting exchanges and pleasant conversations. A big thank you for that.
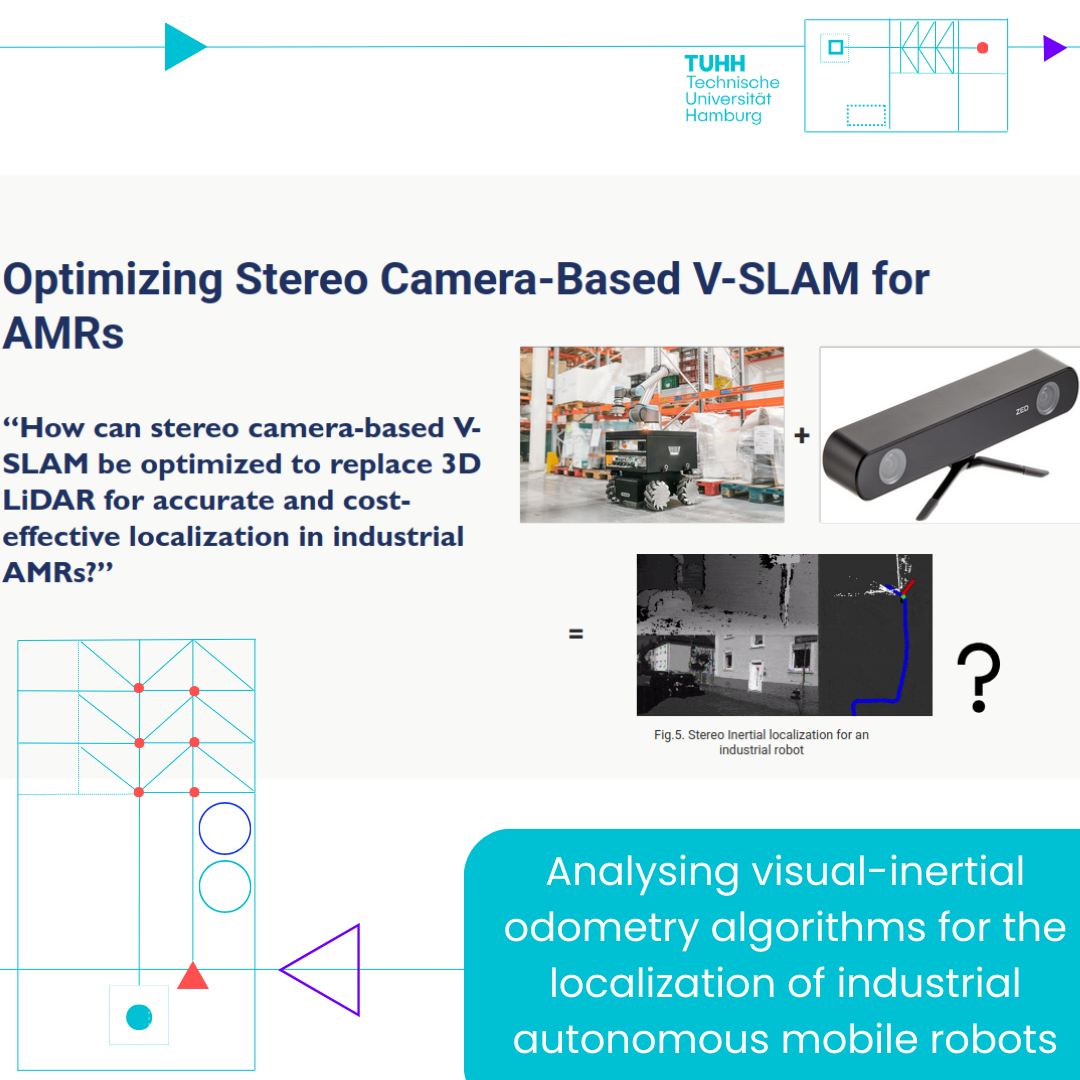
This year we had the opportunity to give two presentations on current problems in the field of localization of mobile robots.
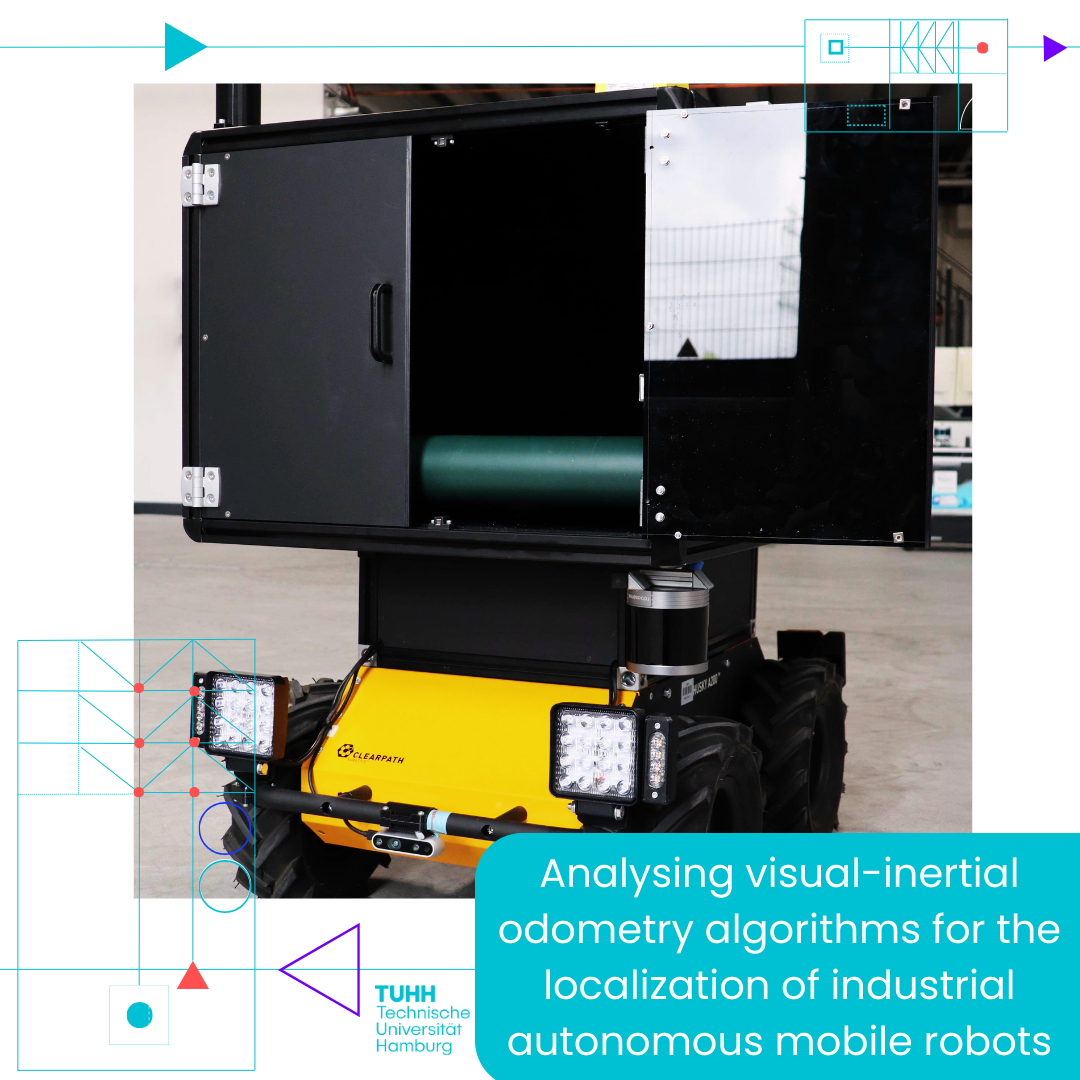
1. Aishwarya Krishnamurthy shared her findings on localization using visual odometry in her presentation “Analysing visual-inertial odometry algorithms for the localization of industrial autonomous mobile robots in intralogistics and manufacturing”. Here, visual odometry algorithms for the localization of autonomous mobile robots (AMR) were investigated. We would like to thank Synergeticon GmbH for the good cooperation 😊.
2. Matthias Renz has dealt with the localization of semi-static objects in his article “Localizing semi-static objects in AMR applications: A comparison of sensors and algorithms”.
We would like to thank you for the invitation and hospitality and look forward to the next specialist colloquium.
October 2024
🌍 In our current projects, we are placing a special focus on selecting the right camera with the right visual localization algorithm. This allows us to achieve the best results in challenging environments.
🤖 Optimizing visual odometry is especially important to improve the quality of localization when other sensors on the robot don’t function well due to environmental conditions.
🤝 We are excited to announce our collaboration with Synergeticon GmbH and were able to present our joint results at WGTL 2024 in Dresden.
💡

September 2024
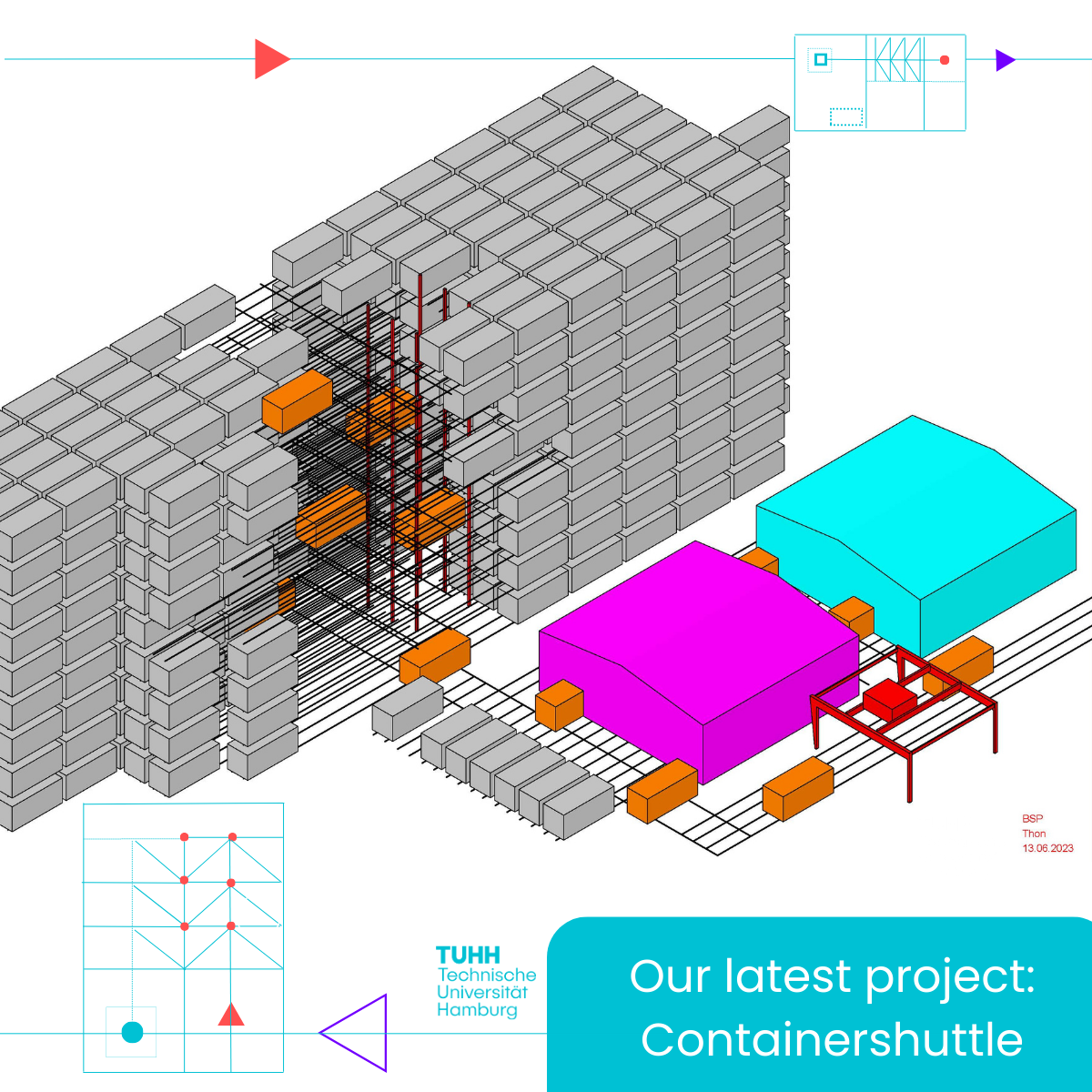
We are excited to share the progress of our latest project (Containershuttle), where we’re conducting a feasibility study on using Automated Guided Vehicles (AGVs) for container tank handling in storage, replacing traditional reach stackers. The results so far have been promising: an AGV-based system could potentially boost productivity by up to 100%, while significantly reducing CO2 emissions by switching from fuel-driven reach stackers to electric-powered AGVs.
Based on these findings, we are now applying for further funding to develop a demonstrator system and continue our research into this innovative solution.
Stay tuned for more updates as we work to shape the future of logistics!
Photo credit Container tank: Ernst Logistik


September 2024
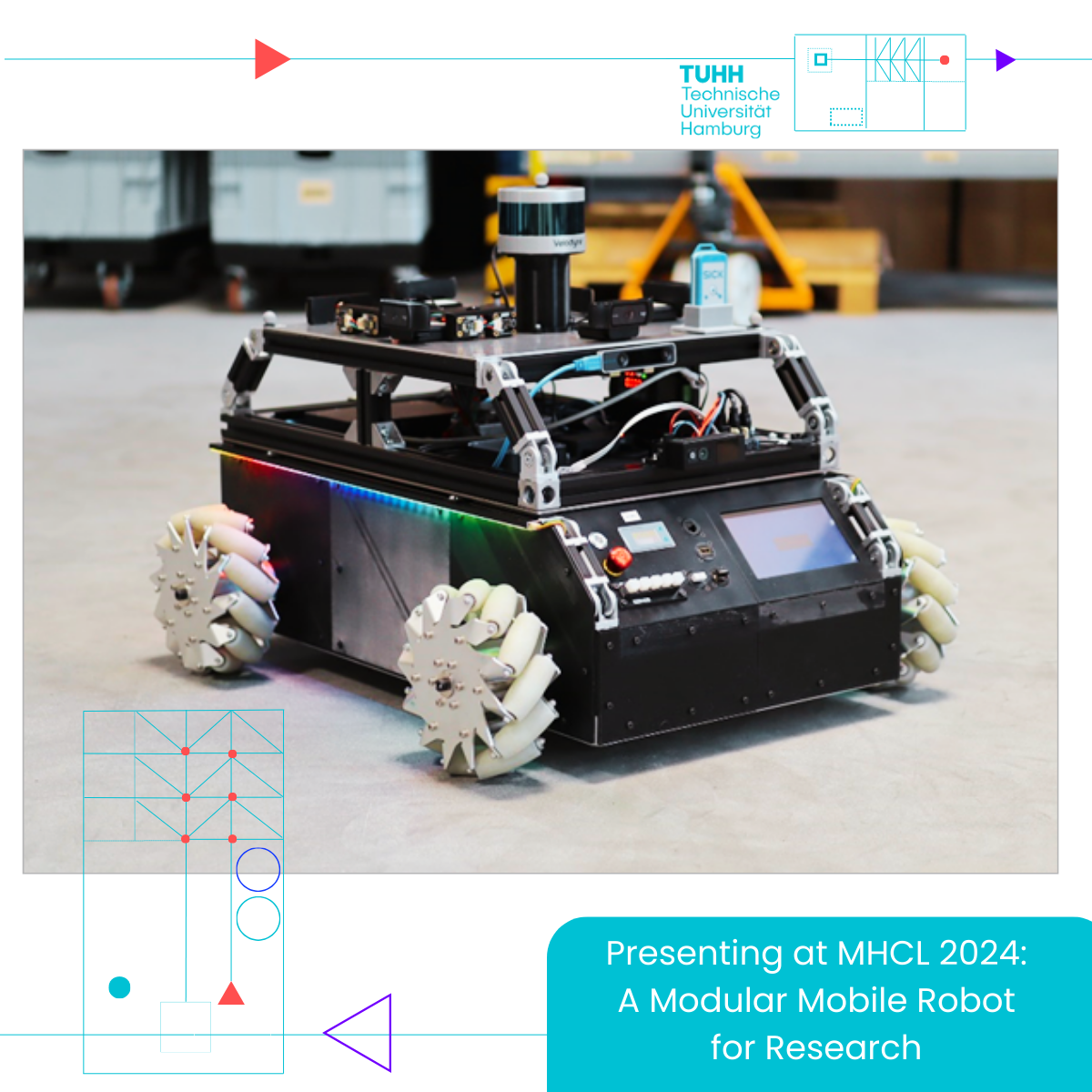
📢 Presenting at MHCL 2024: A Modular Mobile Robot for Research! 📢
We are excited to share that our colleagues, Markus Knitt and Philipp Braun, represented the Institute of Logistics Engineering at the International Conference on Material Handling, Construction, and Logistics (#MHCL) 2024, held at TU Wien on 18-19 September.
Markus introduced our latest innovation: the „MoMo: An Open-Source Modular Mobile Robot Research Platform.“ This versatile platform is designed to support a wide range of research applications in robotics, offering modularity and accessibility to researchers around the world.
The conference featured insightful presentations from participants across 10 countries, covering topics such as conveying technologies, construction equipment, and logistics systems.
We are proud to contribute to the cutting-edge of logistics and robotics research! 🚀


August 2024
🚀 Exciting Updates from our RoboLab project! 🤖
We’re pleased to share the progress of our RoboLab project, where we’ve established a state-of-the-art laboratory for experimenting with various robots. Our lab features a central control station equipped with a graphical user interface that allows for the planning, monitoring, control, and evaluation of all robotics-tasks. Integration of different robots is made easy, ensuring flexibility and adaptability.
The success of our initial project has led to an exciting follow-up: In cooperation with the team from Fraunhofer-CML (https://www.cml.fraunhofer.de/) we are expanding our control station to support collaborative transport of large components. We’re eagerly awaiting the arrival of new robots for this purpose—three Ranger mini units from Agilex. These robots, with their omnidirectional control, will enable complex formation driving for transporting large parts.
Stay tuned for more updates as we embark on this exciting journey!
August 2024
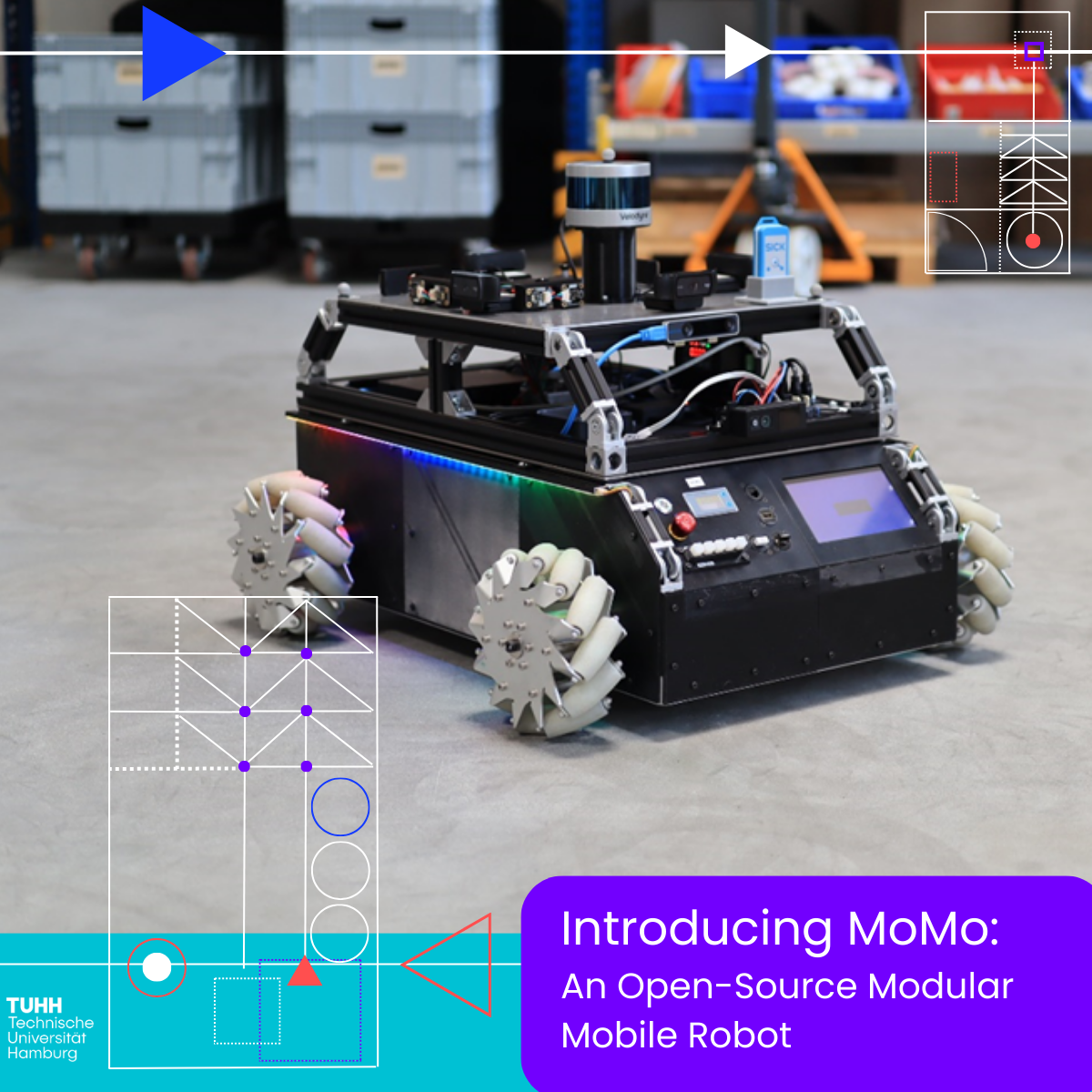
🚀 Introducing MoMo: An Open-Source Modular Mobile Robot 🌐
Meet MoMo, the open-source modular mobile robot platform developed by our team at the Hamburg University of Technology’s Institute of Logistics Engineering. MoMo is designed to drive research applications by offering flexibility, affordability, and customization.
🔧 Key Features:
Omnidirectional Mecanum Drive: Navigate with precision in any direction, perfect for complex indoor environments.
Modular Design: Quickly interchange modules to fit your needs—whether it’s a robotic arm, sensor array, or custom hardware, MoMo is ready for any task.
Open-Source & Cost-Effective: Unlike expensive commercial alternatives, MoMo is fully open-source, with all list of all components and building instructions available.
High Payload Capacity: Supports up to 105 kg, making it suitable for a wide range of applications.
MoMo is powered by ROS 2, ensuring seamless integration and real-time processing for cutting-edge research. Whether you’re working on autonomous navigation, object manipulation, or environmental sensing, MoMo’s adaptability makes it the perfect platform for your next project.
Explore our GitHub repository for detailed assembly instructions and start building your own MoMo today!
August 2024
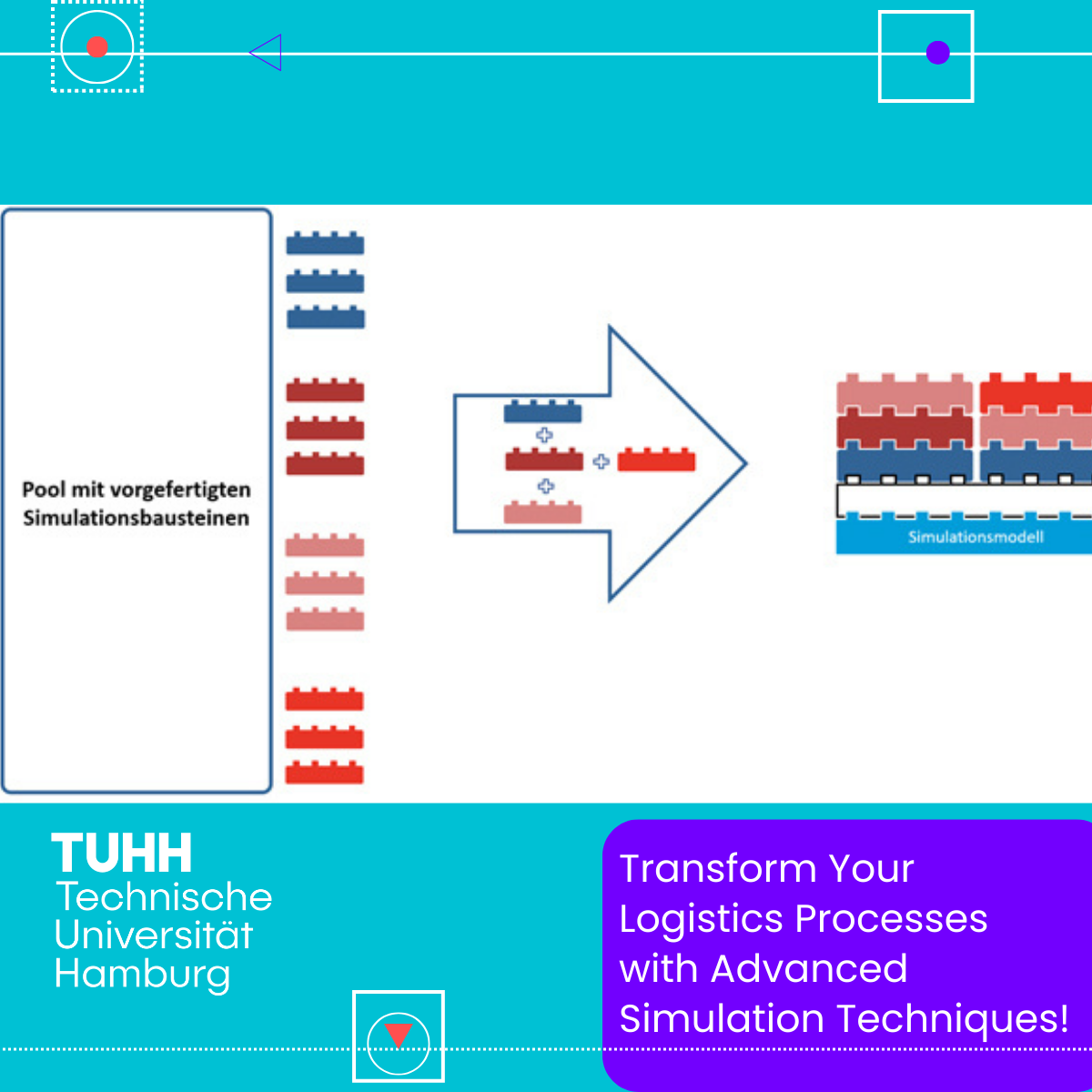
🚀 Transform Your Logistics Processes with Advanced Simulation Techniques!
In the dynamic realm of logistics, planning automated systems is pivotal for success. By leveraging simulation models, we can scrutinize planned processes for feasibility, identifying bottlenecks before projects go live. This approach not only accelerates timelines but also significantly reduces costs.
🔧 Aviation Research Meets Logistics Innovation:
In an exciting subproject within aviation research (Lufo), we’re redefining simulation simplicity and efficiency. Our strategy? Develop a modular system with specially tailored simulation blocks, promising high versatility. These blocks can be combined in myriad ways, enabling the representation of various application scenarios.
💡 Key Benefits at a Glance:
Enhanced Efficiency: Simulation blocks streamline the planning phase.
Flexibility: Tailor-made solutions adapt to diverse requirements.
Cost Savings: Early bottleneck detection minimizes expenses.
🌐 Stay Tuned for More Innovations:
Follow us to stay updated on our advancements in logistics planning. Together, we’re shaping the future of logistics!
++++++++++++++++++++++++++++++++++++
🚀 Revolutionieren Sie Ihre Logistikprozesse mit fortschrittlicher Simulation!
In der Welt der Logistik ist die Planung von automatisierten Systemen ein entscheidender Faktor für den Erfolg. Durch die Nutzung von Simulationsmodellen können wir geplante Prozesse auf ihre Umsetzbarkeit prüfen und bereits vor dem Start eines Projekts Schwachstellen identifizieren. Das bedeutet nicht nur eine erhebliche Zeitersparnis, sondern auch eine deutliche Reduzierung der Kosten.
🔧 Luftfahrtforschung trifft auf Logistikinnovation:
In einem spannenden Teilprojekt aus der Luftfahrtforschung (Lufo) arbeiten wir daran, die Simulation von Logistiksystemen einfacher und effizienter zu gestalten. Unser Ansatz? Das Klemmbausteinprinzip mit speziell angepassten Simulationsbausteinen zu entwickeln. Diese Bausteine bieten eine hohe Anwendungsvielfalt und können beliebig kombiniert werden, um verschiedenste Anwendungsfälle darzustellen.
💡 Vorteile auf einen Blick:
Effizienzsteigerung: Durch die Verwendung von Simulationsbausteinen wird die Planungsphase erheblich verkürzt.
Flexibilität: Die Bausteine lassen sich individuell an verschiedene Anforderungen anpassen.
Kosteneinsparungen: Durch die frühzeitige Identifizierung von Schwachstellen werden Kosten gespart.
🌐 Bleiben Sie auf dem Laufenden:
Folgen Sie uns, um mehr über unsere Fortschritte und Innovationen in der Logistikplanung zu erfahren. Gemeinsam gestalten wir die Zukunft der Logistik!


July 2024
July 2024
Revolutionizing Intralogistics at Airbus! 📦 🛫 🚀
🤖 Meet ORCA, our new autonomous delivery robot! Developed for Airbus GmbH in a Project called ProDiGies where we have collaborated with Siemens AG, Fraunhofer IFAM, IFPT/TUHH, and DLR.
🤖 ORCA is set to transform material transportation between Hall 9 and Hall 14 at Finkenwerder, Hamburg.
🤖 Funded by the German Federal Ministry for Economic Affairs and Climate Action, this innovative project began in September 2022 and will conclude in November 2025.
What makes ORCA so special?
✅Efficient: Transports materials autonomously and quickly (up to 1 m/s) between the halls.
✅Reliable: Built on the robust ClearPath Husky platform with a MonTech conveyor belt for safe autonomously picking up and dropping of KLT containers up to 20kg.
✅Safe: Features a comprehensive safety concept for an illumination: Reflectors, indicators, headlights, taillights and signal lamp). Additionally, intelligent speed adjustments for navigation in confined spaces, especially when people are nearby, have been implemented based on ISO 3691-4 standards. Equipped with 360° LiDAR, Stereo-cameras for collision-free navigation.
✅Intelligent: Two onboard PCs control the robot, with one specifically dedicated to person detection using AI.
The ProDiGieS project is a major step towards a digitized and efficient aviation industry. We are excited to see how this innovation will shape the future of production at Airbus!

June 2024
Welcome to our team!
Since June we have a new member in our team:
Sean Maroofi!
He works as a research assistant in the TaBuLa-LOGplus team and his current tasks are: Collaborating on the LAURA robot and supporting the transition from the ROS1 environment to the ROS2 environment. Here he is particularly involved in shuttle boarding so that the robot can enter and exit reliably.
We are delighted that Sean has joined us and wish him exciting challenges and every success in his work.
June 2024
🚀 The TaBuLa-LOGplus research project is entering its final phase!
Until December 2024, we are investigating the interaction of a smart control center, two automated mobile robots and a VHH bus in public spaces. Together with our partners VPL (Institute for Transport Planning and Logistics), Interlink GmbH and https://palaimon.io/arbeiten, we are working on the implementation of a prototype control center for the efficient use of combined passenger and goods transport.
🔍 The focus of the ITL is on the further development of the Laura transport robot and the development of the control center prototype based on the VDA5050 communication standard. The transport robot LAURA (Lauenburgs AUtomatisierte Roboter Auslieferung) was equipped with mobile high-performance computing units and a 5G mobile radio upgrade on the hardware side. On the software side, it was upgraded to Ubuntu 22.04 and ROS2 and integrated into the control center.
In the coming weeks, these developments will be tested by TÜV Nord. Following successful approval, we will start test operations in Lauenburg/Elbe in Q3 and Q4.
We are looking forward to the results and are delighted to reach this milestone together with our partners!
Photos: Marko Thiel



")
May 2024
From December 11th to 13th, 2023 the IEEE Robotics Computing conference was held in Laguna Hills, California. On three days, research and industry experts came together to exchange insights and create synergies between the fields of Robotics and Computer Science.
Our research associate took part and presented his paper “A Fail-Operational Control Architecture for Autonomous Mobile Robots Based on State Machine Replication”.
In it, he addresses the question, how mobile robots can operate in complex situations safely even when internal errors occur. A novel high level control architecture was developed that uses a network of distributed software nodes and state machine replication to cope with hardware and software failures.
The architecture is tried and tested in our last mile delivery robot Laura that was developed here at the ITL in the scope of the TaBuLa-LOG research project.
Link conference: https://www.ieee-irc.org/
Link Paper: https://ieeexplore.ieee.org/abstract/document/10473573
March 2024
A new short video has been published.
In it, our research associate Mike Wesselhöft explains the main research results of his publication: “Comparing Continuous Single-Agent Reinforcement Learning Controls in a Simulated Logistic Environment using NVIDIA Omniverse”, why they are also relevant for all of us and how the research area will continue.
The paper deals with the comparison of three reinforcement learning methods that are intended to solve the “single agent pathfinding” problem.
This problem describes reaching a specific location in an environment that is unknown to the agent. The state of the art algorithms Proximal Policy Optimization (PPO), Deep Deterministic Policy Gradients (DDPG) and Advantage Actor Critic (A2C) were compared.
Mike Wesselhöft explains all further details and results of his paper in his short interview.
The #paper can be found under the following link: https://www.logistics-journal.de/archive/proceedings/2023/5825/?searchterm=None
https://www.logistics-journal.de/archive/proceedings/2023/5825/?searchterm=None

November 2023
Our joint research project TaBuLa-LOGplus in collaboration with the Institute for Transport Planning and Logistics (VPL), Palaimon GmbH and Interlink GmbH has been selected for the longlist of the German Mobility Award (https://mobilitaetspreis.de/longlist).
This makes us one of 36 projects selected for this list.
The next step in the competition will be the publication of the shortlist in mid-November, which will consist of 12 projects. Those who make it onto the shortlist will have the chance to be selected as award winners on 23.11.23. The official award ceremony will take place on 30.11.23.
October 2023
At the end of August, the topic “Robots in everyday life” was presented on the radio station Radio Hamburg.
Our research assistant Justin Ziegenbein was called in to report on delivery robots, in particular “LAURA” from the TaBuLa-LOGplus project.
We are pleased to present the recording.
Thanks to Radio Hamburg.



July 2023
“Innovative solutions for intralogistics” is the title of the article in the LOGISTICS REPORT FOR THE METROPOLITAN REGION HAMBURG 2022 2023 (Hamburg Logistics Initiative) about the Institute of Technical Logistics/ Hamburg University of Technology.
In summary, it highlights our practical research projects for companies, particularly in the areas of planning and simulation of logistics systems as well as robotics and automation.
Our interdisciplinary team is also highlighted: from mechatronics engineers to computer scientists, everything is included.
The full article can be found on pages 46/47 of the current LOGISTIK Report: LINK
May 2023
Our project SAMSON (SAMSON – Smart Automation Systems and Services for Fruit Growing on the Lower Elbe), which is funded by the Federal Ministry of Food and Agriculture and is being carried out in collaboration with Fraunhofer IFAM, Hamburg University of Applied Sciences (HAW Hamburg), hochschule 21 and Obstbauzentrum Jork (Esteburg), is presented in the current spektrum magazine of Hamburg University of Technology.
The SAMSON research project involves the research and development of intelligent automation systems and services that monitor the entire fruit-growing process and collect seasonal data. These data-based results will subsequently support decisions on the future management of fruit-growing areas.
Link to spektrum magazine: https://www.tuhh.de/spektrum/2304/#12
May 2023
From asset tracking and automatic booking processes to the navigation of mobile robots, localization systems enable a wide range of intralogistics applications. But how can a data-based selection of a suitable localization system take place?
At the Conference on Production Systems and Logistics (CPSL) in Santiago de Querétaro, Mexico, in early March, our research associate Jakob Schyga presented a method for specifying (and in particular quantifying) requirements for localization data. You can get a glimpse of it in the following short video.
The publication can be found under the following link: https://www.repo.uni-hannover.de/counterlike-stats/esstatistics/123456789/13539
April 2023
At the Institute of Technical Logistics, the position of Senior Engineer has been newly filled as of 01.04.2023. Dr. Johannes Hinckeldeyn has left the TUHH and taken up a new position as Group-wide Research Manager at KION – Still .
The position of Chief Engineer has been taken over by research assistants Philipp Braun and Hendrik Rose .
Hendrik Rose takes over the management in the topics robotics and automation.
Philipp Braun takes over the management in the subject areas of logistics planning and simulation.
The organizational management is taken over jointly by both.
Philipp Braun and Hendrik Rose are the new contact persons of the ITL besides the institute director Prof. Jochen Kreutzfeldt.


March 2023
Welcome Viktor , welcome Mattias!
We welcome Viktor and Mattias from the Swedish “KTH Royal Institute of Technology” as exchange students at our institute. They participate in the ERASMUS+ program and support our TaBuLa-LOGplus team:
One research goal of the TaBuLa-LOGplus project is to create and publish a data set for mobile robots. To this end, we are cooperating with the Division of Robotics, Perception and Learning (RPL) at KTH .
During reciprocal visits, various sensor data were recorded in Stockholm and Hamburg.
In addition to a terrestrial laser scanner to create a reference point cloud, both a handheld setup and our transport robot Laura were used to record several sensor data sets.
As part of the cooperation, the Swedish students support the data analysis and continue to use it for their master’s theses in the field of 3D object recognition.
March 2023
Mobile robots that have to localize themselves autonomously for construction or in buildings are equipped with laser scanners, so-called lidar sensors.
In our study together with the Institute for Digital and Autonomous Construction – IDAC, various lidar systems were tested with a walking robot and compared in different scenarios. There were major differences between the sensors in terms of localization accuracy under different conditions (e.g. with windows, doors or in the presence of people).
All details: Studie
and the short video here.
February 2023
At the beginning of February, we visited Dematic GmbH in Heusenstamm. The company specializes in the development, manufacture and sale of products and solutions in the fields of intralogistics, warehouse and logistics automation.
We were given a tour of the Tech Center and were thus able to gain an insight into Dematic GmbH’s range of products and services.
It is divided into the topics and business areas of logistics software, warehouse technology, conveyor technology, sorting systems, palletizing systems and order picking technology.
We would like to thank the team once again for the visit and the detailed explanations and look forward to sharing some exciting impressions.


February 2023
We welcome our new employees in the SAMSON project, who have been working at the institute since February 2023:
Jiahua Wei/ Wissenschaftlicher Mitarbeiter
and
Ermin Kevric/ Technischer Mitarbeiter
A WARM WELCOME AT THE ITL!
February 2023

January 2023
In our current short study together with the “Institute for Digital and Autonomous Construction” at the Hamburg University of Technology on the localization of mobile robot systems, processes and technologies that will be increasingly used in building construction in the future were examined.
The practical analyses revealed various findings on different laser measuring devices as well as insights into the precise localization of mobile robots. By examining the sensor technologies, differences in localization accuracies were recorded.
This study provides trend-setting insights into the positioning of moving elements in the planning, construction and operation of buildings where laser scanners will be used in the future.
Complete study can be found here: Link
January 2023
New “Future Farm” in the Altes Land region – launch of the “Smart Automation Systems and Services for Fruit Growing on the Lower Elbe” (“SAMSON”) research project funded by the Federal Ministry of Food and Agriculture (BMEL)
On January 24, 2023, the Federal Minister of Food and Agriculture, Cem Özdemir, presented the project partners Fraunhofer IFAM, HAW Hamburg, hochschule 21 and TU Hamburg with the funding decision for the “SAMSON” future farm as part of the award ceremony for the “Digital Future Farms and Future Regions for Sustainable Agriculture” at the International Green Week (IGW) in Berlin.
You can find all the details under the following link: Pressemitteilung
Project page: Link

Start des Obstbau-Digitalisierungsprojekts »SAMSON«: Bundesminister Cem Özdemir überreicht den Förderbescheid an Alexander Kammann (hochschule 21), Christian Böhlmann (Fraunhofer IFAM), Prof. Dr. Tim Tiedemann (HAW Hamburg), Jiahua Wei (TU Hamburg) und Benjamin Schulze (Fraunhofer IFAM); (v.l.n.r.; © BMEL/photothek).

Konzeptdarstellung des Obstbau-Zukunftsbetriebs im Alten Land – Digitale Vernetzung, autonome Maschinen und KI-basierte Auswertealgorithmen werden auf dem Experimentierfeld im Projekt SAMSON erforscht.
January 2023
Explanatory video: A metrological and application-related comparison of six consumer grade stereo depth cameras for the use in robotics
In his publication, Michel Heinemann illustrates comparisons of 3D cameras (stereo cameras) for use in robotics.
He shows which models are more suitable so that the robotic system works safely and well in the end.
He explains his findings in our short video.
The publication can be found under the following Link
December 2022
The ITL team wishes you a merry Christmas and a happy new year.
We wish you a merry Christmas and a happy new year.
December 2022
Our ITL Christmas party took place last week.
We tried our hand at archery at Beach Hamburg, which the organizer Eventsport Hamburg did a great job of organizing for us.
Shooting the arrow into the golden yellow center had to be trained first. Combining concentration, strength and technique was a new challenge for everyone.
With fun and ambition, everyone mastered the various competitions that the Eventsport Hamburg team had devised.
At the end, the lucky winners received a trophy.
Afterwards, we went to “Christoffers Singin Tapas” and enjoyed Spanish delicacies accompanied by great music.





NOVEMBER 2022
Estimating the Pose of a Euro Pallet with an RGB Camera based on Synthetic Training Data
Camera-based object recognition and localization based on neural networks enable a wide range of applications in the field of intralogistics. In the paper “Estimating the Pose of a Euro Pallet with an RGB Camera based on Synthetic Training Data”, the authors Markus Knitt and Jakob Schyga show how a classic Euro pallet can be localized in space using a simple webcam.
The neural networks used for this were only trained with artificially generated images. In the following video, our research assistant Jakob Schyga gives a brief insight into the topic.
The paper was published in this year’s issue of the Logistics Journal and can be found at the following: Link
NOVEMBER 2022
Object recognition is becoming increasingly important in intralogistics, e.g. by mobile robots.
This is achieved through machine learning with algorithms that need to be trained.
In the case of object recognition, for example, image or video data sets are required as training data sets. We looked at the LOCO training dataset from the Technical University of Munich and evaluated it.
In our short video, we explain and evaluate our findings and explain why they could be relevant when using the LOCO training dataset.
The publication “Critical Evaluation of LOCO dataset with Machine Learning” can be accessed via the Link
NOVEMBER 2022
At the end of October, our first doctoral student at the institute received her Dr.-Ing. degree and was awarded her doctorate with her thesis “Development, implementation and evaluation of a new approach for efficient material flow simulation”.
Dr.-Ing. Svenja Bahnsen was employed at our institute as a research assistant from 2016 – 2021. During this time, she focused in particular on the topics of simulation and material flow. This topic then also became the specialty for her dissertation.
First reviewer Prof. Dr.-Ing. Jochen Kreutzfeldt, head of our institute, and second reviewer Prof. Dr.-Ing. Hermann Lödding, head of the Institute of Production Management and Technology, evaluated her work.
Prof. Dr. Heike Flämig was chair of the examination board and hosted the public event at the Institute of Technical Logistics.
Following Dr. Bahnsen’s doctoral lecture, her family and our colleagues celebrated this great success with her.
Congratulations to her!




NOVEMBER 2022
How can complex influences on the accuracy of localization systems be investigated?
In collaboration with the Institute of Embedded Systems, we have addressed this question in the context of #intralogistics applications.
We conducted 120 repeatable experiments under different influencing variables and presented the results in decision trees.
Furthermore, we demonstrate the use of decision trees to compare system performance, select a suitable system for an application, customize the system or environment configuration, and understand the relevance of influencing factors.
In the following video, our research associate Jakob Schyga gives a brief insight and explains why the topic is ultimately relevant for all of us.
The results were presented at this year’s “Conference for Indoor Positioning and Indoor Navigation (IPIN)” and published at IEEE Xplore: Link
NOVEMBER 2022
Our new website is online!
After several months of relaunch work, we are delighted with our new website.



JULI 2022
TaBuLaLOG
Laura proves it: Combined passenger and freight transportation in automated public transport can work
For 2 years, the two exotic-looking TaBuLaShuttles in Lauenburg on the Elbe attracted the curious glances of Lauenburg residents, tourists and trade visitors. The latter had come to Lauenburg especially for this sight. The joint project between the district of Herzogtum Lauenburg and the Technical University of Hamburg, together with other partners, was initially intended to research the possible applications of automated local public transport. In a later phase of the project, a combined passenger and goods transport system using the Laura transport robot was added. Last Thursday, June 30, the TUHH researchers presented their results to an expert audience and gave an outlook and future projects.
All further details can be found in the press release: Link
The “Test center for automated buses in the district of Herzogtum Lauenburg (TaBuLa)” and the follow-up project “TaBuLa-LOG – Combined passenger and goods transport in automated shuttles” were supported by the project partners Hamburg University of Technology and the district of Herzogtum Lauenburg and funded by the Federal Ministry of Digital and Transport as part of the funding guidelines “Automated and networked driving” and “A future-proof, sustainable mobility system through automated driving and networking” with 3.7 million euros.
JUNI 2022
Kick-off signal for TaBuLa-LOGplus
Kick-off for the smart control center for automated transport robots and buses in the city of Lauenburg/Elbe
On Monday, May 16, 2022, the kick-off meeting for the new TaBuLa-LOGplus project took place at the Hamburg University of Technology (TUHH) to discuss the steps to achieve the project goals, the expectations of the various stakeholders regarding the project outcome and strategic questions regarding the direction of the project.
TaBuLa-LOGplus is the second follow-up project to TaBuLa after TaBuLa-LOG. TaBuLa-LOGplus aims to develop and test a smart control center for automated transport robots and buses in the city of Lauenburg on the Elbe. A new aspect of this follow-up project is the use and research of AI, which gives the transport robot ‘eyes’ locally and in real time, as well as supporting rational decision-making in the background in the control center.
The TaBuLa-LOGplus project is scheduled to run for over two years, from 01.04.2022 to 30.06.2024, and is funded by the Federal Ministry for Digital and Transport as part of the funding guideline “A future-proof, sustainable mobility system through automated driving and networking” with 2.34 million euros.
The project is supported by the partners TUHH with the Institute of Technical Logistics (ITL) and the Institute of Transport Planning and Logistics (VPL) as well as the companies Palaimon GmbH and Interlink GmbH. Associated partners are the district of Herzogtum Lauenburg, the city of Lauenburg an der Elbe, Yunex Traffic (Siemens spin-off) and the KION Group.
All further details can be found in the press release: 2022-06-03_TaBuLa-LOGplus_Pressemitteilung_Auftakt_FIN
