Neues auf Instagram
UNSERE NEWS
April 2025
We are excited to share that our work at Institut für Technische Logistik/Technische Universität Hamburg has been featured in the Bulletin, on pages 54-55: „Automating Intralogistics with the Hashtag#ORCA delivery robot“.
This article showcases the innovative solutions and cutting-edge technology that Hashtag#ORCA contributes to the intralogistics field, enhancing efficiency and reliability.
You can read the full article here: BULLETIN
🙂 +++
Wir freuen uns, dass unsere Arbeit am Institut für Technische Logistik im Artikel „Automatisierung der Intralogistik mit dem autonomen Lieferroboter ORCA“ im Bulletin (Ausgabe 1/2025) auf den Seiten 54-55 vorgestellt wird.
Der Artikel präsentiert die innovativen Lösungen und die Spitzentechnologie, die ORCA in das Feld der Hashtag#Intralogistik einbringt und Effizienz sowie Zuverlässigkeit steigert.
Den vollständigen Artikel finden Sie hier: BULLETIN

März 2025
Workshop on Autonomous Delivery and Service Robots on Pedestrian and Cycle Paths am 19. und 20. Mai in Sckeuditz bei Leizpig
Die TU Bergakademie Freiberg lädt Sie herzlich Zusammenarbeit mit der Technischen Universität Hamburg (ITL) zu unserem bevorstehenden Workshop über die Herausforderungen und Möglichkeiten autonomer Roboter auf Fuß- und Radwegen ein!
Vom 19. bis 20. Mai 2025 kommen Experten und Enthusiasten in Schkeuditz zusammen, um sich über neueste Forschungsergebnisse auszutauschen und Netzwerke zu knüpfen.
Alle Informationen dazu finden Sie auf unserem Beitrag:
Dezember 2024
Forschungsprojekt TaBuLa-LOGplus in Lauenburg/ Elbe 🤖
Ende 2024 ging das Forschungsprojekt TaBuLa-LOGplus zu Ende.
In dem Projekt konnten wir erfolgreich zwei autonome Transportroboter sowie eine Leitstelle fertigstellen.
Die Transportroboter sind in Lauenburg/Elbe eingesetzt worden und fuhren dort selbstständig Im Rahmen des Testbetriebs mit Bussen des ÖPNV mit.
Weiterhin wurden von Projektpartnern wissenschaftliche Analysen zu den Einflüssen einer Roboterauslieferung auf Verkehr, Umwelt und Gesellschaft untersucht und Konzepte zur operativen Integration erstellt.
Das Video soll einen kurzen Einblick in die Zielsetzung, Durchführung und die Ergebnisse des Projekts geben.
Weitere Informationen finden Sie auch auf der Website des BMDV, oder auf der projekteigenen Website.
Wir bedanken uns bei allen Projektbeteiligten recht herzlich und freuen uns über die gewonnenen Ergebnisse.
Dezember 2024
Short video about the publication: Using Learning Objective-based Course Modeling for Complete Exercise Generation: From Course Material to an Aggregated Knowledge Representation“/ Deniz Schmidt, Max Uzulis
Digitization is not a trivial process if certain concepts play a role in the analogous origin, especially if they can not be directly seen. Here our research assistant Deniz Schmidt briefly explains why this is the case for digitization of education.
Link to publication: Link
Kurzvideo zur Veröffentlichung: „Using Learning Objective-based Course Modeling for Complete Exercise Generation: From Course Material to an Aggregated Knowledge Representation“/ Deniz Schmidt, Max Uzulis
Digitalisierung ist kein trivialer Prozess, wenn gewisse Konzepte in dem analogen Ursprung eine Rolle spielen, insbesondere wenn diese nicht ersichtlich sind. Unser Wissenschaftlicher Mitarbeiter Deniz Schmidt erklärt hier kurz wieso dies in der Digitalisierung der Lehre der Fall ist.

November 2024
🎉 TUHH Christmas Get-Together 🎉 🎅 🎄
After packing surprise bags for refugee kids last week we all headed to a burger place for a laid-back evening with lots of laughs, conversation, and tasty food.
It was a nice way to spend time with colleagues and start the holiday season on a high note. Thanks to everyone who made it so enjoyable!
November 2024
Revolutionizing Intralogistics at Airbus! 🚀📦🛫
🤖 Meet ORCA, our cutting-edge autonomous delivery robot! Developed for Airbus GmbH as part of the ProDiGies Project, in collaboration with Siemens AG, Fraunhofer IFAM, IFPT/TUHH, and DLR.
What is ORCA’s mission?
Seamlessly transporting materials between Hall 9 and Hall 14 at Airbus Finkenwerder in Hamburg.
Backed by Innovation:
Funded by the German Federal Ministry for Economic Affairs and Climate Action, this groundbreaking project started in September 2022 and will run until November 2025.
Why is ORCA a game-changer?
✅ Efficient: Autonomous and fast material transportation at speeds up to 1 m/s.
✅ Reliable: Built on the robust ClearPath Husky platform, equipped with a MonTech conveyor belt for automated handling of KLT containers up to 20 kg.
✅ Safe:
- Comprehensive safety features: reflectors, headlights, taillights, signal lamps, and ISO 3691-4-compliant speed adjustments for human interaction.
- Advanced navigation: 360° LiDAR and stereo cameras ensure collision-free operation, even in tight spaces.
This is smart intralogistics in action! 💡
Stay tuned as ORCA revolutionizes material flow efficiency at Airbus! 🌟
Oktober 2024
🌟 An exchange among experts at the 20th Logistics Colloquium of the WGTL in Dresden 🌟
It was great to take part in this year’s conference of the Wissenschaftliche Gesellschaft für Technische Logistik e.V. (WGTL)! The WGTL provides a platform for the exchange of knowledge and experience between scientists, researchers and practitioners, building a bridge between theory and practice.
This year, we had the pleasure of welcoming the colleagues of Prof. Dr.-Ing. habil. Thorsten Schmidt at the Faculty of Mechanical Engineering in beautiful Dresden. In addition to the many exciting ideas of our colleagues from the chairs of Technical Logistics, we can look back on many interesting exchanges and pleasant conversations. A big thank you for that.
This year we had the opportunity to give two presentations on current problems in the field of localization of mobile robots.
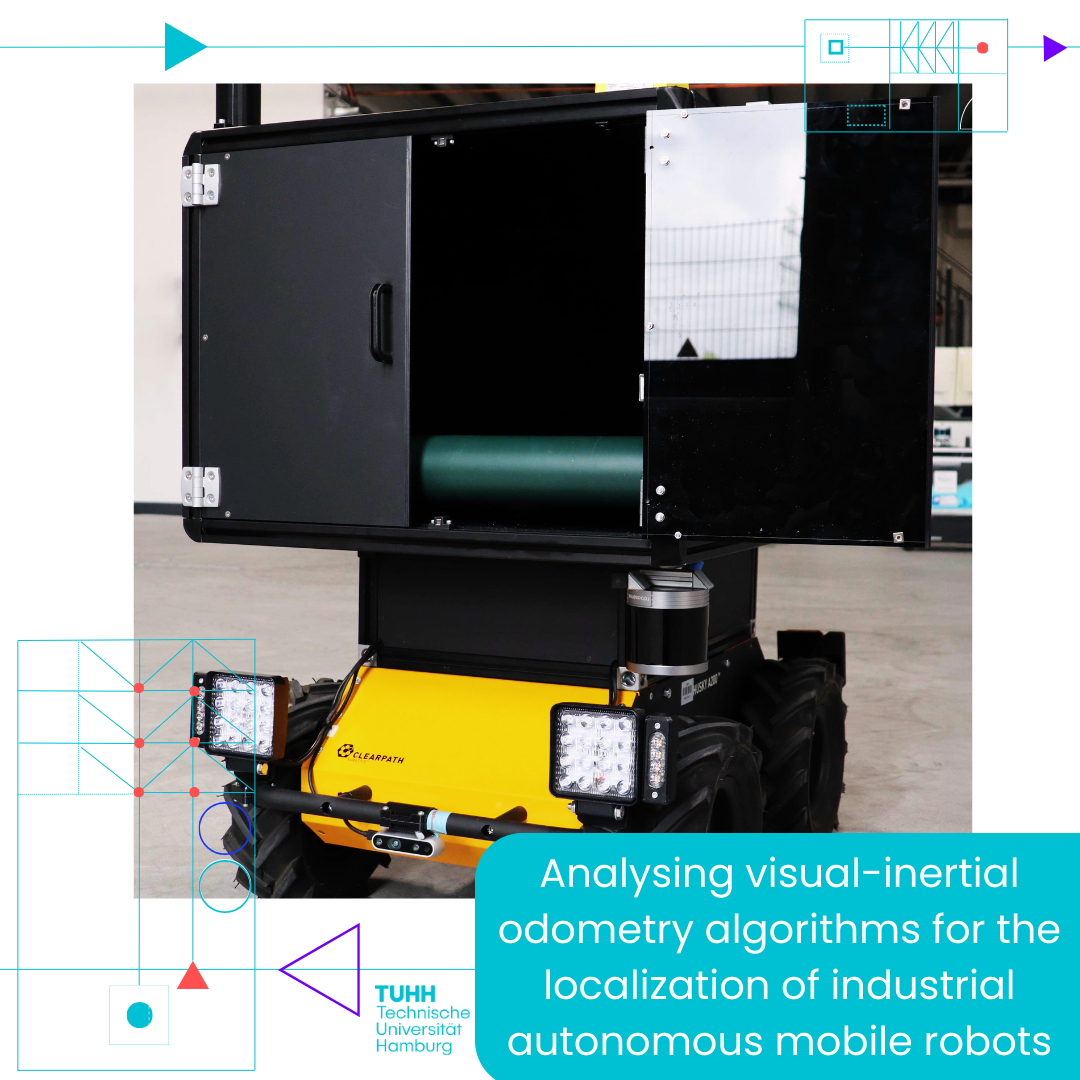
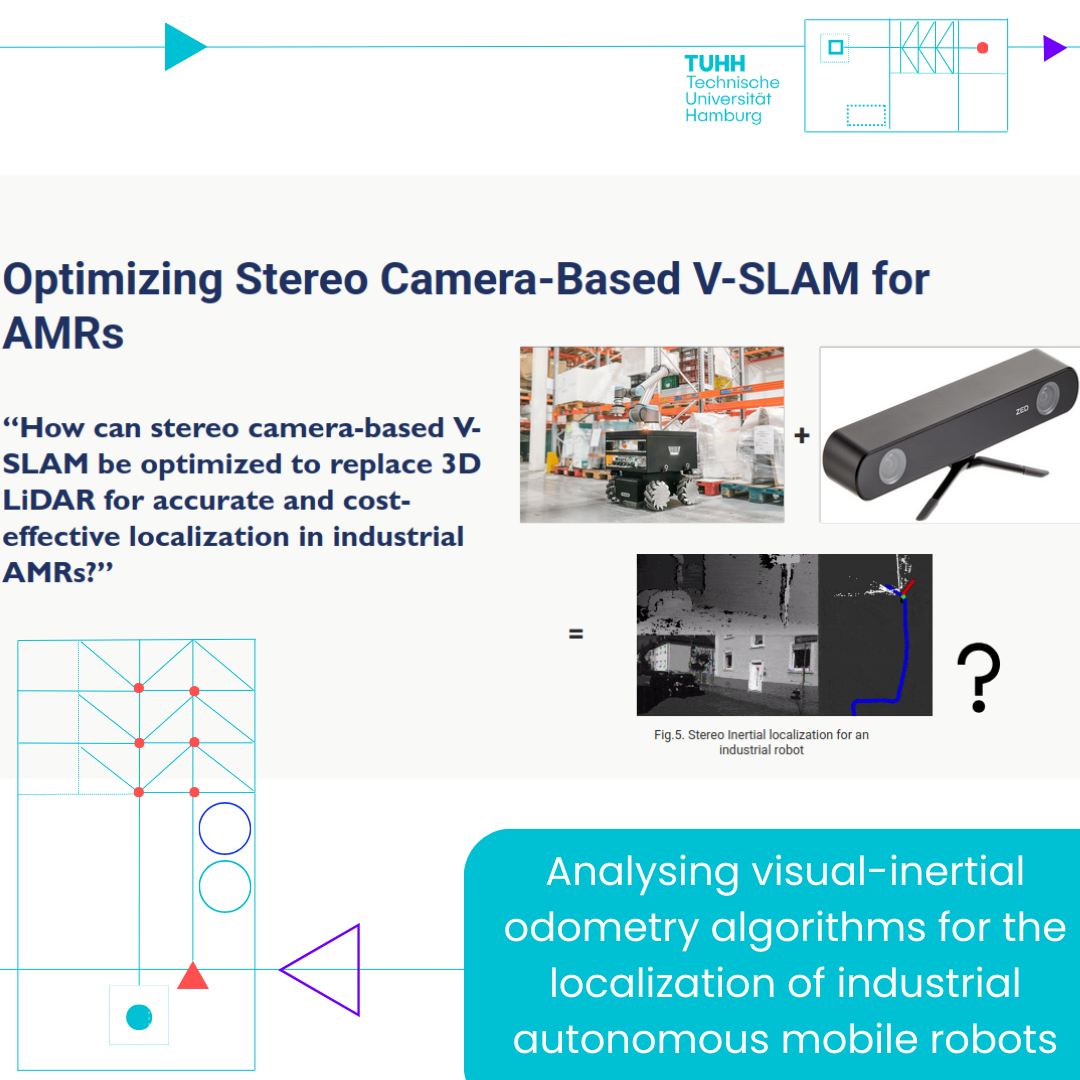
1. Aishwarya Krishnamurthy shared her findings on localization using visual odometry in her presentation “Analysing visual-inertial odometry algorithms for the localization of industrial autonomous mobile robots in intralogistics and manufacturing”. Here, visual odometry algorithms for the localization of autonomous mobile robots (AMR) were investigated. We would like to thank Synergeticon GmbH for the good cooperation 😊.
2. Matthias Renz has dealt with the localization of semi-static objects in his article “Localizing semi-static objects in AMR applications: A comparison of sensors and algorithms”.
We would like to thank you for the invitation and hospitality and look forward to the next specialist colloquium.
Oktober 2024
🌍 In our current projects, we are placing a special focus on selecting the right camera with the right visual localization algorithm. This allows us to achieve the best results in challenging environments.
🤖 Optimizing visual odometry is especially important to improve the quality of localization when other sensors on the robot don’t function well due to environmental conditions.
🤝 We are excited to announce our collaboration with Synergeticon GmbH and were able to present our joint results at WGTL 2024 in Dresden.
💡


September 2024
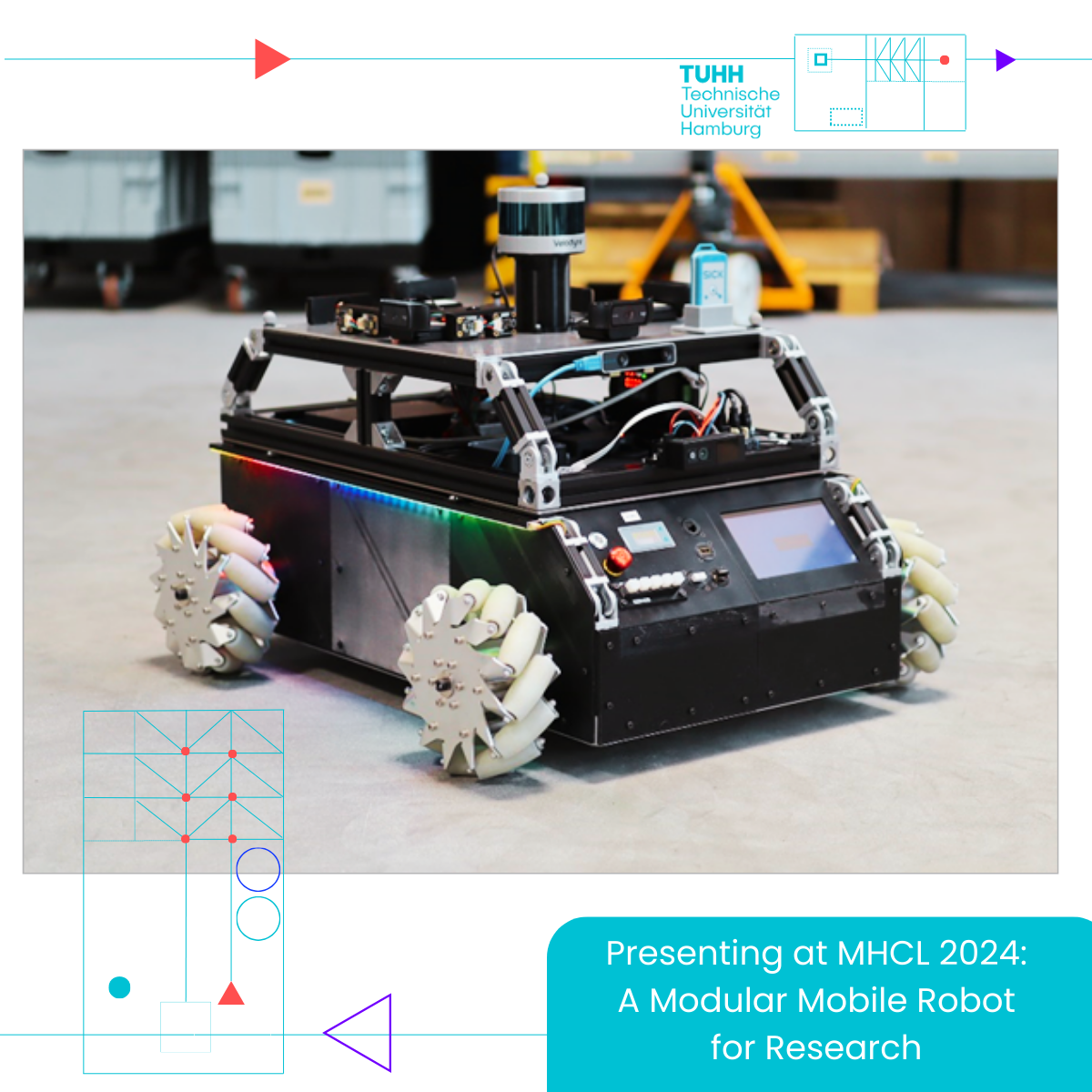
📢 Presenting at MHCL 2024: A Modular Mobile Robot for Research! 📢
We are excited to share that our colleagues, Markus Knitt and Philipp Braun, represented the Institute of Logistics Engineering at the International Conference on Material Handling, Construction, and Logistics (#MHCL) 2024, held at TU Wien on 18-19 September.
Markus introduced our latest innovation: the „MoMo: An Open-Source Modular Mobile Robot Research Platform.“ This versatile platform is designed to support a wide range of research applications in robotics, offering modularity and accessibility to researchers around the world.
The conference featured insightful presentations from participants across 10 countries, covering topics such as conveying technologies, construction equipment, and logistics systems.
We are proud to contribute to the cutting-edge of logistics and robotics research! 🚀


August 2024
🚀 Exciting Updates from our RoboLab project! 🤖
We’re pleased to share the progress of our RoboLab project, where we’ve established a state-of-the-art laboratory for experimenting with various robots. Our lab features a central control station equipped with a graphical user interface that allows for the planning, monitoring, control, and evaluation of all robotics-tasks. Integration of different robots is made easy, ensuring flexibility and adaptability.
The success of our initial project has led to an exciting follow-up: In cooperation with the team from Fraunhofer-CML (https://www.cml.fraunhofer.de/) we are expanding our control station to support collaborative transport of large components. We’re eagerly awaiting the arrival of new robots for this purpose—three Ranger mini units from Agilex. These robots, with their omnidirectional control, will enable complex formation driving for transporting large parts.
Stay tuned for more updates as we embark on this exciting journey!
August 2024
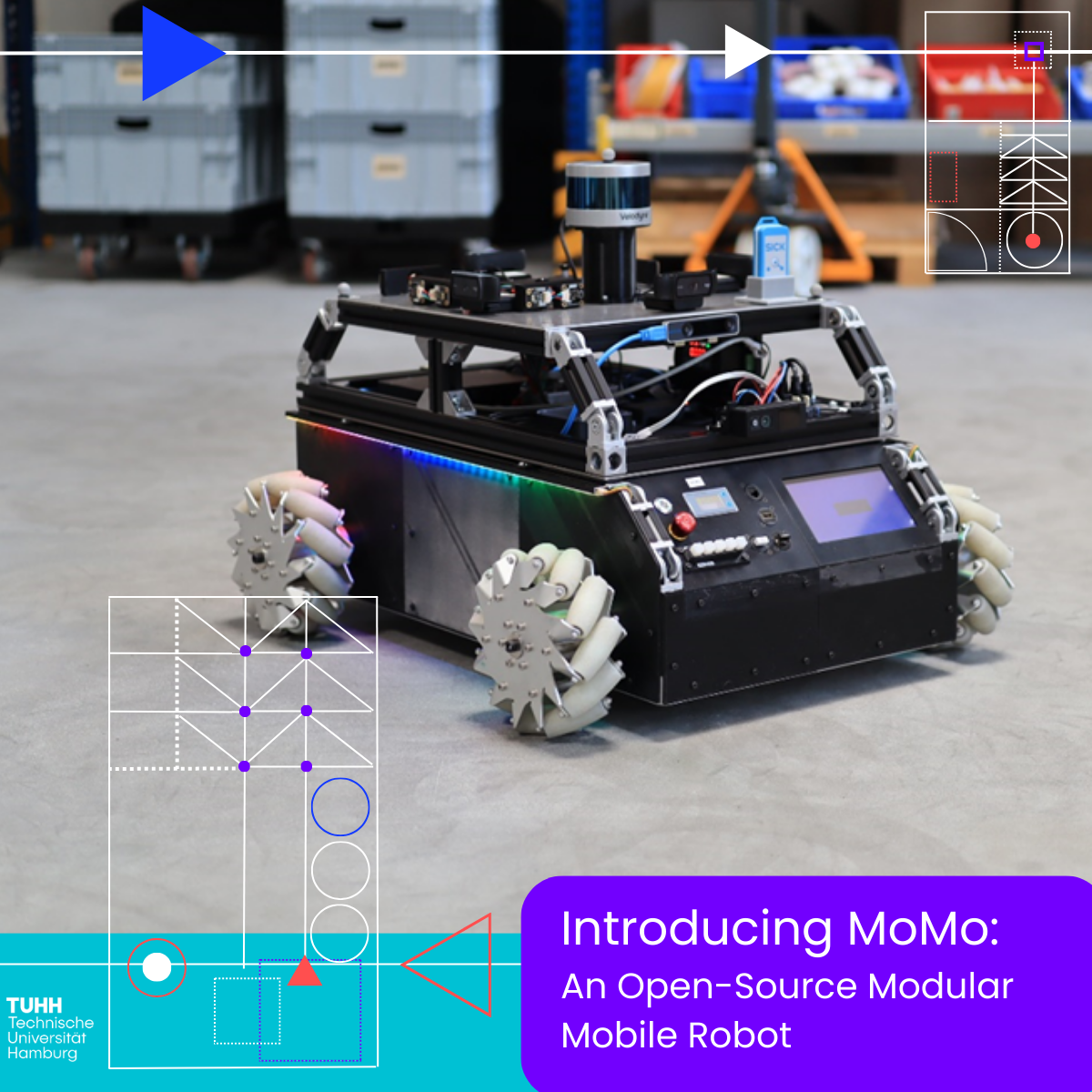
🚀 Introducing MoMo: An Open-Source Modular Mobile Robot 🌐
Meet MoMo, the open-source modular mobile robot platform developed by our team at the Hamburg University of Technology’s Institute of Logistics Engineering. MoMo is designed to drive research applications by offering flexibility, affordability, and customization.
🔧 Key Features:
Omnidirectional Mecanum Drive: Navigate with precision in any direction, perfect for complex indoor environments.
Modular Design: Quickly interchange modules to fit your needs—whether it’s a robotic arm, sensor array, or custom hardware, MoMo is ready for any task.
Open-Source & Cost-Effective: Unlike expensive commercial alternatives, MoMo is fully open-source, with all list of all components and building instructions available.
High Payload Capacity: Supports up to 105 kg, making it suitable for a wide range of applications.
MoMo is powered by ROS 2, ensuring seamless integration and real-time processing for cutting-edge research. Whether you’re working on autonomous navigation, object manipulation, or environmental sensing, MoMo’s adaptability makes it the perfect platform for your next project.
Explore our GitHub repository for detailed assembly instructions and start building your own MoMo today!
August 2024
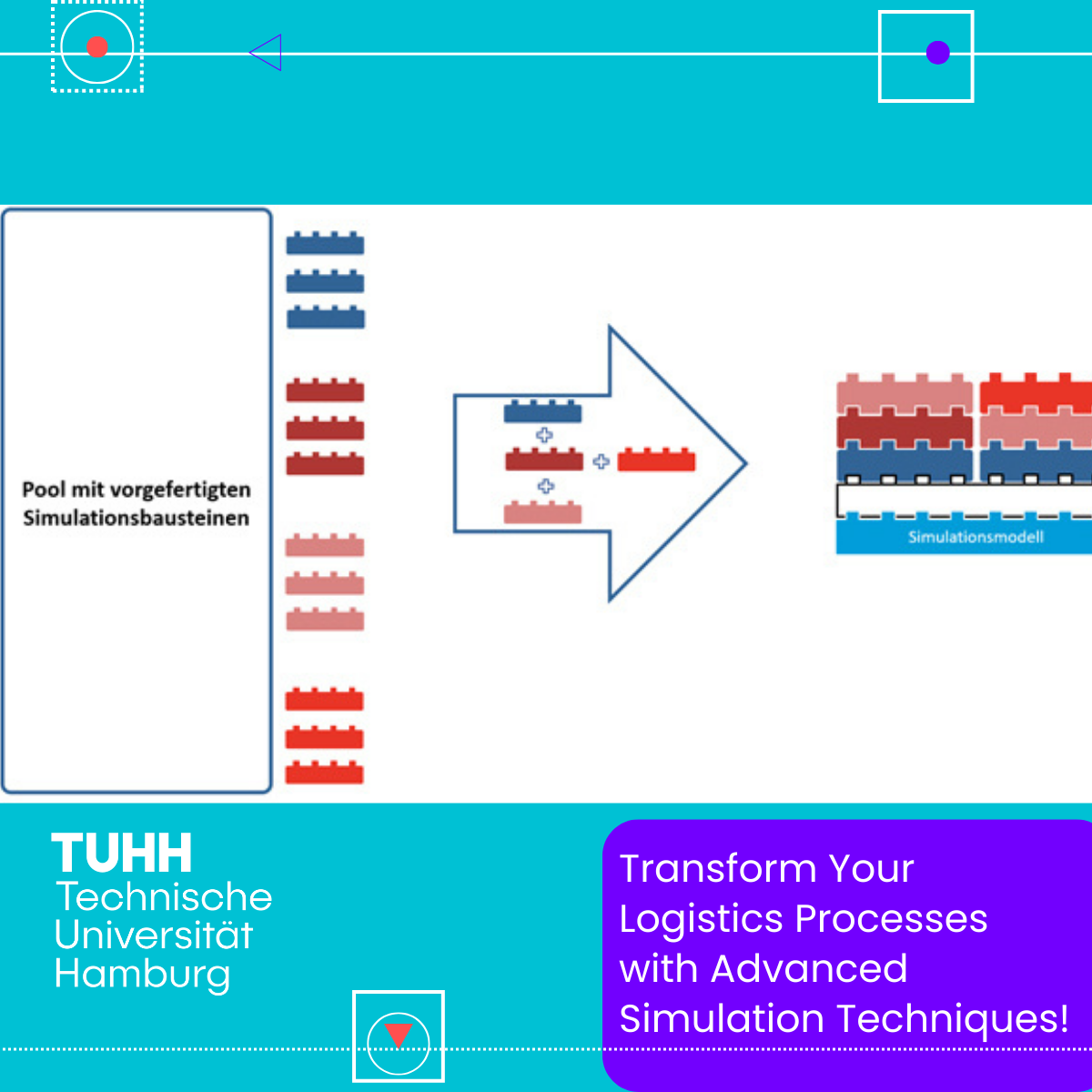
🚀 Transform Your Logistics Processes with Advanced Simulation Techniques!
In the dynamic realm of logistics, planning automated systems is pivotal for success. By leveraging simulation models, we can scrutinize planned processes for feasibility, identifying bottlenecks before projects go live. This approach not only accelerates timelines but also significantly reduces costs.
🔧 Aviation Research Meets Logistics Innovation:
In an exciting subproject within aviation research (Lufo), we’re redefining simulation simplicity and efficiency. Our strategy? Develop a modular system with specially tailored simulation blocks, promising high versatility. These blocks can be combined in myriad ways, enabling the representation of various application scenarios.
💡 Key Benefits at a Glance:
Enhanced Efficiency: Simulation blocks streamline the planning phase.
Flexibility: Tailor-made solutions adapt to diverse requirements.
Cost Savings: Early bottleneck detection minimizes expenses.
🌐 Stay Tuned for More Innovations:
Follow us to stay updated on our advancements in logistics planning. Together, we’re shaping the future of logistics!
++++++++++++++++++++++++++++++++++++
🚀 Revolutionieren Sie Ihre Logistikprozesse mit fortschrittlicher Simulation!
In der Welt der Logistik ist die Planung von automatisierten Systemen ein entscheidender Faktor für den Erfolg. Durch die Nutzung von Simulationsmodellen können wir geplante Prozesse auf ihre Umsetzbarkeit prüfen und bereits vor dem Start eines Projekts Schwachstellen identifizieren. Das bedeutet nicht nur eine erhebliche Zeitersparnis, sondern auch eine deutliche Reduzierung der Kosten.
🔧 Luftfahrtforschung trifft auf Logistikinnovation:
In einem spannenden Teilprojekt aus der Luftfahrtforschung (Lufo) arbeiten wir daran, die Simulation von Logistiksystemen einfacher und effizienter zu gestalten. Unser Ansatz? Das Klemmbausteinprinzip mit speziell angepassten Simulationsbausteinen zu entwickeln. Diese Bausteine bieten eine hohe Anwendungsvielfalt und können beliebig kombiniert werden, um verschiedenste Anwendungsfälle darzustellen.
💡 Vorteile auf einen Blick:
Effizienzsteigerung: Durch die Verwendung von Simulationsbausteinen wird die Planungsphase erheblich verkürzt.
Flexibilität: Die Bausteine lassen sich individuell an verschiedene Anforderungen anpassen.
Kosteneinsparungen: Durch die frühzeitige Identifizierung von Schwachstellen werden Kosten gespart.
🌐 Bleiben Sie auf dem Laufenden:
Folgen Sie uns, um mehr über unsere Fortschritte und Innovationen in der Logistikplanung zu erfahren. Gemeinsam gestalten wir die Zukunft der Logistik!


Juli 2024
Juli 2024
Revolutionizing Intralogistics at Airbus! 📦 🛫 🚀
🤖 Meet ORCA, our new autonomous delivery robot! Developed for Airbus GmbH in a Project called ProDiGies where we have collaborated with Siemens AG, Fraunhofer IFAM, IFPT/TUHH, and DLR.
🤖 ORCA is set to transform material transportation between Hall 9 and Hall 14 at Finkenwerder, Hamburg.
🤖 Funded by the German Federal Ministry for Economic Affairs and Climate Action, this innovative project began in September 2022 and will conclude in November 2025.
What makes ORCA so special?
✅Efficient: Transports materials autonomously and quickly (up to 1 m/s) between the halls.
✅Reliable: Built on the robust ClearPath Husky platform with a MonTech conveyor belt for safe autonomously picking up and dropping of KLT containers up to 20kg.
✅Safe: Features a comprehensive safety concept for an illumination: Reflectors, indicators, headlights, taillights and signal lamp). Additionally, intelligent speed adjustments for navigation in confined spaces, especially when people are nearby, have been implemented based on ISO 3691-4 standards. Equipped with 360° LiDAR, Stereo-cameras for collision-free navigation.
✅Intelligent: Two onboard PCs control the robot, with one specifically dedicated to person detection using AI.
The ProDiGieS project is a major step towards a digitized and efficient aviation industry. We are excited to see how this innovation will shape the future of production at Airbus!

Juni 2024
Willkommen!
Seit Juni haben wir einen neuen Mitarbeiter in unserem Team:
Sean Maroofi!
Er arbeitet als Wissenschaftlicher Mitarbeiter im Team TaBuLa-LOGplus und seine derzeitigen Aufgaben sind: Mitarbeit am LAURA Roboter und Unterstützung beim Umstieg von der ROS1-Umgebung auf die ROS2-Umgebung. Hier ist er insbesondere am shuttle boarding beschäftigt, so dass der Roboter zuverlässig ein- und ausfahren kann.
Wir freuen uns, dass Sean bei uns gestartet ist und wünschen ihm spannende Herausforderungen und viel Erfolg bei seiner Arbeit.
Juni 2024
🚀 Das Forschungsprojekt TaBuLa-LOGplus geht in die finale Phase!
Bis Dezember 2024 untersuchen wir das Zusammenspiel einer smarten Leitstelle, zwei automatisierter mobiler Roboter und einem Bus der VHH im öffentlichen Raum. Gemeinsam mit unseren Partnern VPL (Institut für Verkehrsplanung und Logistik), Interlink GmbH und https://palaimon.io/arbeiten wir an der Implementierung einer prototypischen Leitstelle für die effiziente Nutzung von kombiniertem Personen- und Warentransport.
🔍 Der Fokus des ITLs liegt dabei auf der Weiterentwicklung der Transportroboter Laura und der Entwicklung des Leitstandsprototyps in Anlehnung an den VDA5050 Kommunikationsstandard. Der Transportroboter LAURA (Lauenburgs AUtomatisierte Roboter Auslieferung) wurde hardwareseitig mit mobilen Hochleistungsrecheneinheiten und einem 5G-Mobilfunk-Upgrade ausgestattet. Softwareseitig erfolgte der Umzug auf Ubuntu 22.04 und ROS2, sowie die Einbindung in die Leitstelle.
In den kommenden Wochen werden diese Entwicklungen vom TÜV Nord geprüft. Nach erfolgreicher Genehmigung starten wir in Q3 und Q4 den Testbetrieb in Lauenburg/Elbe.
Wir sind gespannt auf die Ergebnisse und freuen uns, diesen Meilenstein gemeinsam mit unseren Partnern zu erreichen!
Fotos: Marko Thiel



")
Mai 2024
From December 11th to 13th, 2023 the IEEE Robotics Computing conference was held in Laguna Hills, California. On three days, research and industry experts came together to exchange insights and create synergies between the fields of Robotics and Computer Science.
Our research associate took part and presented his paper „A Fail-Operational Control Architecture for Autonomous Mobile Robots Based on State Machine Replication“.
In it, he addresses the question, how mobile robots can operate in complex situations safely even when internal errors occur. A novel high level control architecture was developed that uses a network of distributed software nodes and state machine replication to cope with hardware and software failures.
The architecture is tried and tested in our last mile delivery robot Laura that was developed here at the ITL in the scope of the TaBuLa-LOG research project.
Link conference: https://www.ieee-irc.org/
Link Paper: https://ieeexplore.ieee.org/abstract/document/10473573
März 2024
Ein neues Kurz-Video wurde veröffentlicht.
In diesem erklärt unser Wissenschaftlicher Mitarbeiter Mike Wesselhöft die wesentlichen Forschungsergebnisse seiner Publikation: „Comparing Continuous Single-Agent Reinforcement Learning Controls in a Simulated Logistic Environment using NVIDIA Omniverse“, warum sie auch für uns alle relevant sind und wie es in dem Forschungsbereich weiter geht.
In dem Paper geht es um den Vergleich von drei Reinforcement Learning, die das „Single Agent Pathfinding“ Problem lösen sollen.
Dieses Problem beschreibt das Erreichen eines spezifischen Ortes in einem Umfeld, welches dem Agenten nicht bekannt ist. Verglichen worden sind dafür die State of the Art Algorithmen Proximal Policy Optimization (PPO), Deep Deterministic Policy Gradients (DDPG) und Advantage Actor Critic (A2C).
Alle weiteren Details und Ergebnisse seines Papers,erklärt Mike Wesselhöft in seinem Kurzinterview.
Das #Paper ist unter folgendem Link zu finden: https://www.logistics-journal.de/archive/proceedings/2023/5825/?searchterm=None

November 2023
Unser gemeinsames Forschungsprojekt TaBuLa-LOGplus in Zusammenarbeit mit dem Institut für Verkehrsplanung und Logistik (VPL), Palaimon GmbH und Interlink GmbH ist für die Longlist des Deutschen Mobilitätspreises ausgewählt worden (https://mobilitaetspreis.de/longlist).
Wir sind damit eines von 36 Projekten, die für diese Liste ausgewählt wurden.
Als nächster Schritt im Wettbewerb wird Mitte November die Shortlist veröffentlicht, die aus 12 Projekten bestehen wird. Diejenigen, die es auf die Shortlist schaffen, haben die Chance, als Preisträgerinnen und Preisträger am 23.11.23 ausgewählt zu werden. Die offizielle Preisverleihung findet am 30.11.23 statt.
Oktober 2023
Ende August wurde das Thema „Roboter im Alltag“ bei Radiosender Radio Hamburg vorgestellt.
Hierzu wurde unser Wissenschaftlicher Mitarbeiter Justin Ziegenbein zurate gezogen, um über Lieferroboter, insbesondere „LAURA“ aus dem Projekt TaBuLa-LOGplus zu berichten.
Wir freuen uns, den Mitschnitt davon zu präsentieren.
Danke an Radio Hamburg.



Juli 2023
„Innovative Lösungen für die Intralogistik“ so betitelt der LOGISTIK Report FÜR DIE METROPOLREGION HAMBURG 2022 2023 (Logistik-Initiative Hamburg) seinen Artikel über das Institut für Technische Logistik/ Technische Universität Hamburg.
Zusammengefasst werden unsere praxisnahen Forschungsprojekte für Unternehmen, insbesondere in den Bereichen Planung und Simulation von logistischen Systemen sowie Robotik und Automatisierung hervorgehoben.
Auch wird auf unser interdisziplinäres Team hingewiesen: vom Mechatroniker bis zur Informatikerin ist alles dabei.
Der vollständige Artikel befindet sich auf den Seiten 46/47 im akuellen LOGISTIK Report: LINK
Mai 2023
Im aktuellen spektrum Magazin der Technische Universität Hamburg wird unser Projekt SAMSON (SAMSON – Smarte Automatisierungssysteme und -services für den Obstanbau an der Niederelbe) vorgestellt, welches vom Bundesministerium für Ernährung und Landwirtschaft gefördert wird und in Zusammenarbeit mit Fraunhofer IFAM, Hochschule für Angewandte Wissenschaften Hamburg (HAW Hamburg), hochschule 21 sowie Obstbauzentrum Jork (Esteburg) erfolgt.
Das Forschungsprojekt SAMSON umfasst die Erforschung und Entwicklung intelligenter Automatisierungssysteme und -dienste, die den gesamten Obstanbau überwachen und saisonale Daten sammeln. Im Anschluss unterstützen diese datenbasierten Ergebnisse bei Entscheidungen für eine zukünftige Bewirtschaftung der Obstanbauflächen.
Link zum spektrum Magazin: https://www.tuhh.de/spektrum/2304/#12
Mai 2023
Vom Asset-Tracking über automatische Buchungsprozesse bis hin zur Navigation mobiler Roboter ermöglichen Lokalisierungssysteme vielfältige Anwendungen in der Intralogistik. Doch wie kann eine datenbasierte Auswahl eines geeigneten Lokalisierungssystems erfolgen?
Auf der Conference on Production Systems and Logistics (CPSL) Anfang März in Santiago de Querétaro, Mexiko, stellte unser wissenschaftlicher Mitarbeiter Jakob Schyga eine Methode zur Spezifikation (und insbesondere Quantifizierung) von Anforderungen an Lokalisierungsdaten vor. In folgendem Kurzvideo können Sie sich einen Eindruck davon verschaffen.
Die Veröffentlichung ist unter folgendem Link zu finden: https://www.repo.uni-hannover.de/counterlike-stats/esstatistics/123456789/13539
From asset tracking and automatic booking processes to the navigation of mobile robots, localization systems enable a wide range of intralogistics applications. But how can a data-based selection of a suitable localization system take place?
At the Conference on Production Systems and Logistics (CPSL) in Santiago de Querétaro, Mexico, in early March, our research associate Jakob Schyga presented a method for specifying (and in particular quantifying) requirements for localization data. You can get a glimpse of it in the following short video.
The publication can be found under the following link: https://www.repo.uni-hannover.de/counterlike-stats/esstatistics/123456789/13539
April 2023
Am Institut für Technische Logistik wurde zum 01.04.2023 die Stelle des Oberingenieurs neu besetzt.
Dr. Johannes Hinckeldeyn hat die TUHH verlassen und eine neue Stelle als konzernweiter Research Manager bei KION – Still übernommen.
Die Position des Oberingenieurs wurde durch die wissenschaftlichen Mitarbeiter Philipp Braun und Hendrik Rose übernommen.
Hendrik Rose übernimmt die fachliche Leitung in den Themenbereichen Robotik und Automatisierung.
Philipp Braun übernimmt die fachliche Leitung in den Themenbereichen Logistikplanung und – simulation.
Die organisatorische Leitung übernehmen beide gemeinschaftlich.
Philipp Braun und Hendrik Rose sind somit die neuen Ansprechpartner des ITL neben dem Institutsleiteor Prof. Jochen Kreutzfeldt.
At the Institute of Technical Logistics, the position of Senior Engineer has been newly filled as of 01.04.2023. Dr. Johannes Hinckeldeyn has left the TUHH and taken up a new position as Group-wide Research Manager at KION – Still .
The position of Chief Engineer has been taken over by research assistants Philipp Braun and Hendrik Rose .
Hendrik Rose takes over the management in the topics robotics and automation.
Philipp Braun takes over the management in the subject areas of logistics planning and simulation.
The organizational management is taken over jointly by both.
Philipp Braun and Hendrik Rose are the new contact persons of the ITL besides the institute director Prof. Jochen Kreutzfeldt.


März 2023
Welcome Viktor , welcome Mattias!
Wir begrüßen Viktor und Mattias vom schwedischen „KTH Royal Institute of Technology“ als Austausch-Studenten an unserem Institut. Sie nehmen am ERASMUS+ Programm teil und unterstützen unser TaBuLa-LOGplus-Team:
Ein Forschungsziel des Projektes TaBuLa-LOGplus ist die Erstellung und Veröffentlichung eines Datensatzes für mobile Roboter. Dazu kooperieren wir mit der Division of Robotics, Perception and Learning (RPL) der KTH .
Bei wechselseitigen Besuchen wurden verschiedene Sensordaten in Stockholm und Hamburg aufgenommen.
Neben einem terrestrischen Laserscanner zur Erstellung einer Referenzpunktwolke kamen dabei sowohl ein Handheld-Setup als auch unser Transportroboter Laura zur Aufnahme mehrerer Sensordatensets zum Einsatz.
Im Rahmen der Kooperation unterstützen die schwedischen Studenten die Datenauswertung und nutzen diese weiterhin für ihre Masterarbeiten im Themenbereich der 3D–Objekterkennung .
März 2023
Mobile Roboter, die sich für den Bau oder in Gebäuden autonom lokalisieren müssen, werden mit Laserscannern ausgestattet, sog. Lidar-Sensoren.
In unserer Studie zusammen mit dem Institut für Digitales und Autonomes Bauen – IDAC wurden verschiedene Lidar-Systeme mit einem Laufroboter erprobt und in verschiedenen Szenarien verglichen. Es zeigten sich große Unterschiede zwischen den Sensoren bei der Lokalisierungsgenauigkeit unter verschiedenen Bedingungen (z.B. bei Fenstern, Türen oder in Anwesenheit von Personen).
Alle Details dazu: Studie
und im Kurz-Video hier.
Februar 2023
Anfang Februar besuchten wir die Firma Dematic GmbH in Heusenstamm. Das Unternehmen hat sich auf die Entwicklung, die Herstellung und den Vertrieb von Produkten und Lösungen aus den Bereichen Intralogistik, Lager- und Logistikautomatisierung spezialisiert.
Wir erhielten eine Tour durch das Tech Center und konnten uns somit einen Einblick über das Liefer- und Leistungsprogramm von Dematic GmbH verschaffen.
Es gliedert sich unter anderem in die Themen und Geschäftsbereiche Logistik-Software, Lagertechnik, Fördertechnik, Sortiersysteme, Palettiersysteme sowie Kommissioniertechnik.
Für den Besuch und die ausführlichen Erklärungen durch das Team bedanken wir hier und nochmals und freuen uns einige spannenden Eindrücke teilen zu dürfen.


Februar 2023
Wir begrüßen unsere neuen Mitarbeiter im Projekt SAMSON, die seit Februar 2023 bei uns am Institut tätig sind:
Jiahua Wei/ Wissenschaftlicher Mitarbeiter
sowie
Ermin Kevric/ Technischer Mitarbeiter
HERZLICH WILLKOMMEN AM ITL!
Februar 2023

Januar 2023
In unserer aktuellen Kurzstudie zusammen mit dem „Institut für Digitales und Autonomes Bauen“ an der Technische Universität Hamburg zur Lokalisierung von mobilen Robotersystemen wurden Prozesse und Technologien untersucht, die in Zukunft vermehrt im Hochbau zum Einsatz kommen.
Die praxisnahen Analysen zeigten unterschiedliche Erkenntnisse zu verschiedenen Lasermessgeräten als auch Einsichten zur Präzision Verortung von mobilen Robotern. Durch die Untersuchung der Sensortechnologien wurden Unterschiede zu Lokalisierungsgenauigkeiten festgehalten.
Diese Studie liefert richtungsweisende Erkenntnisse zur Positionierung beweglicher Elemente in Planung, Ausführung und Betrieb von Gebäuden, bei denen Laserscanner zukünftig eingesetzt werden.
Vollständige Studie ist hier zu finden: Link
Januar 2023
Neuer »Zukunftsbetrieb« im Alten Land – Start des vom Bundesministerium für Ernährung und Landwirtschaft (BMEL) geförderten Forschungsprojekts »Smarte Automatisierungssysteme und -services für den Obstanbau an der Niederelbe« (»SAMSON«)
Im Rahmen der Vergabe der Förderbescheide der »Digitalen Zukunftsbetriebe und Zukunftsregionen für eine nachhaltige Landwirtschaft« auf der Internationalen Grünen Woche (IGW) in Berlin überreichte der Bundesminister für Ernährung und Landwirtschaft Cem Özdemir am 24. Januar 2023 den Projektpartnern Fraunhofer IFAM, HAW Hamburg, hochschule 21 und TU Hamburg den Bescheid für den Zukunftsbetrieb »SAMSON«.
Alle Details dazu finden Sie unter dem folgenden Link: Pressemitteilung
Projektseite: Link

Start des Obstbau-Digitalisierungsprojekts »SAMSON«: Bundesminister Cem Özdemir überreicht den Förderbescheid an Alexander Kammann (hochschule 21), Christian Böhlmann (Fraunhofer IFAM), Prof. Dr. Tim Tiedemann (HAW Hamburg), Jiahua Wei (TU Hamburg) und Benjamin Schulze (Fraunhofer IFAM); (v.l.n.r.; © BMEL/photothek).

Konzeptdarstellung des Obstbau-Zukunftsbetriebs im Alten Land – Digitale Vernetzung, autonome Maschinen und KI-basierte Auswertealgorithmen werden auf dem Experimentierfeld im Projekt SAMSON erforscht.
Januar 2023
Erklärvideo: A metrological and application-related comparison of six consumer grade stereo depth cameras for the use in robotics
In seiner Publikation veranschaulicht Michel Heinemann Vergleiche von 3D-Kameras (Stereo Kameras) für Einsatz in der Robotik .
Er zeigt auf, welche Modelle geeigneter sind, damit das robotische System am Ende sicher und gut funktioniert.
In unserem KurzVideo erklärt er seine Erkentnisse.
Die Veröffentlichung dazu ist unter folgendem Link zu finden: Link
Dezember 2022
Das Team des ITLs wünscht frohe Weihnachten und ein gutes, neues Jahr.
We wish you a merry Christmas and a happy new year.
Dezember 2022
In der letzten Woche fand unsere ITL-Weihnachtsfeier statt.
Im Beach Hamburg erprobten wir uns im Bogenschießen, das der Veranstalter Eventsport Hamburg großartig für uns organisiert hatte.
Den Pfeil in die goldgelbe Mitte zu schießen, musste erst einmal trainiert werden. Konzentration, Kraft und Technik in eine Einheit zu bringen, war für alle eine neue Herausforderung.
Mit Spaß und Ehrgeiz meisterten alle die verschiedenen Wettkämpfe, die sich das Team von Eventsport Hamburg ausgedacht hatte.
Am Ende gab es für die glücklichen Gewinner einen Pokal.
Im Anschluß kehrten wir in „Christoffers Singin Tapas“ ein und genossen spanische Köstlichkeiten mit tollen Musikeinlagen.

NOVEMBER 2022
Estimating the Pose of a Euro Pallet with an RGB Camera based on Synthetic Training Data
Kamerabasierte Objekterkennung und Lokalisierung auf Basis neuronaler Netze ermöglichen vielfältige Anwendungen im Bereich der Intralogistik. In dem Paper „Estimating the Pose of a Euro Pallet with an RGB Camera based on Synthetic Training Data“ zeigen die Autoren Markus Knitt und Jakob Schyga, wie eine klassische Europalette mit einer einfachen Webcam im Raum lokalisiert werden kann.
Die dafür verwendeten neuronalen Netze wurden nur mit künstlich erzeugten Bildern trainiert. Im folgenden Video gibt unser wissenschaftlicher Mitarbeiter Jakob Schyga einen kurzen Einblick in das Thema.
Das Paper wurde in der diesjährigen Ausgabe des Logistics Journals veröffentlicht und ist unter folgendem Link zu finden: Link
NOVEMBER 2022
Objekterkennung wird immer wichtiger in der Intralogistik, z.B. durch mobile Roboter.
Dies erfolgt durch Maschinelles Lernen mit Algorithmen, die trainiert werden müssen.
Dafür werden im Fall von Objekterkennung z.B. Bild- oder Videodatensätze als Trainingsdatensätze benötigt. Wir haben uns mit dem LOCO Trainingsdatensatz der TU München befasst und diesen bewertet.
In unserem Kurz-Video erläutern und bewerten wir unsere Erkenntnisse und erklären, warum diese bei einer Verwendung des LOCO Trainingsdatensatzes relevant sein könnten.
Die Publikation „Critical Evaluation of LOCO dataset with Machine Learning“ kann unter dem Link aufgerufen werden: Link
NOVEMBER 2022
Ende Oktober erhielt unsere erste Doktorandin des Instituts feierlich ihren Titel Dr.-Ing. und wurde mit ihrer Arbeit „Entwicklung, Implementierung und Evaluation eines neuen Ansatzes für die effiziente Materialflusssimulation“ promoviert.
Frau Dr.-Ing. Svenja Bahnsen war 2016 – 2021 an unserem Institut als Wissenschaftliche Mitarbeiterin angestellt. In dieser Zeit beschäftigte sie sich insbesondere mit den Themen Simulation und Materialfluss. Dieses Thema wurde dann auch zum Spezialgebiet für ihre Dissertation.
Erstgutachter Prof. Dr.-Ing. Jochen Kreutzfeldt, Institutsleiter unseres Instituts sowie Zweitgutachter Prof. Dr.-Ing. Hermann Lödding, Institutsleiter des Instituts für Produktionsmanagement und -technik bewerteten ihre Arbeit.
Univ.-Prof. Dr.-lng. Heike Flämig war Vorsitzende des Prüfungsausschusses und lud zu der öffentlichen Veranstaltung am Institut für Technische Logistik ein.
Im Anschluss an den Promotionsvortrag von Frau Dr. Bahnsen feierten ihre Familie und unsere Kollegen*innen mit ihr zusammen zu diesem großartigen Erfolg.
Herzlichen Glückwunsch!




NOVEMBER 2022
Wie lassen sich komplexe Einflüsse auf die Genauigkeit von Lokalisierungssystemen untersuchen?
In Zusammenarbeit mit dem Institut für Eingebettete Systeme haben wir uns mit dieser Frage im Kontext #intralogistischer Anwendungen beschäftigt.
Wir haben 120 wiederholbare Experimente unter unterschiedlichen Einflussgrößen durchgeführt und die Ergebnisse in Entscheidungsbäumen dargestellt.
Darüber hinaus demonstrieren wir die Verwendung von Entscheidungsbäumen, um die Systemleistung zu vergleichen, ein geeignetes System für eine Anwendung auszuwählen, die System- oder Umgebungskonfiguration anzupassen und die Relevanz von Einflussfaktoren zu verstehen.
Im folgenden Video gibt unser wissenschaftlicher Mitarbeiter Jakob Schyga einen kurzen Einblick und erklärt, warum das Thema letztendlich für uns alle relevant ist.
Die Ergebnisse wurde auf der diesjährigen „Conference for Indoor Positioning and Indoor Navigation (IPIN)“ vorgestellt und bei IEEE Xplore veröffentlicht: Link
NOVEMBER 2022
Unsere neue Website ist online!
Nach mehrmonatigem Relaunch-Arbeiten, freuen wir uns über unseren neuen Webauftritt.



JULI 2022
TaBuLaLOG
Mit Laura ist bewiesen: Die kombinierte Personen- und Güterbeförderung im automatisiert fahrenden ÖPNV kann funktionieren
2 Jahre lang zogen die beiden exotisch anmutenden TaBuLaShuttle in Lauenburg an der Elbe die neugierigen Blicke der Lauenburgerinnen und Lauenburger sowie der touristischen Gäste und des Fachpublikums die Blicke auf sich. Letzteres war extra für diesen Anblick nach Lauenburg gekommen. Das gemeinsame Projekt des Kreises Herzogtum Lauenburg und der Technischen Universität Hamburg, zusammen mit weiteren Partnern, sollte im ersten Schritt die Einsatzmöglichkeiten eines automatisierten Öffentlichen Personennahverkehrs erforschen. In einer späteren Projektphase kam dann noch ein kombinierter Fahrgast- und Warentransport mittels Transportroboter Laura hinzu. Am vergangenen Donnerstag, 30. Juni präsentierten die Forscherinnen und Forscher der TUHH dem Fachpublikum ihre Ergebnisse und gaben einen Ausblick und zukünftige Projekte.
Alle weiteren Details finden Sie in der Pressemittelung: Link
Das „Testzentrum für automatisiert verkehrende Busse im Kreis Herzogtum Lauenburg (TaBuLa)“ sowie das Nachfolgeprojekt „TaBuLa-LOG – Kombinierter Personen- und Warentransport in automatisierten Shuttles“ wurden durch die Projektpartner Technische Universität Hamburg und Kreis Herzogtum Lauenburg getragen und durch das Bundesministerium für Digitales und Verkehr im Rahmen der Förderrichtlinien „Automatisiertes und vernetztes Fahren“ und „Ein zukunftsfähiges, nachhaltiges Mobilitätssystem durch automatisiertes Fahren und Vernetzung“ mit 3,7 Millionen Euro gefördert.
JUNI 2022
Startschuss für TaBuLa-LOGplus
Auftakt für die smarte Leitstelle für automatisierte Transportroboter und Busse in der Stadt Lauenburg/Elbe
Am Montag, den 16. Mai 2022 fand das Auftakttreffen zum neuen Projekt TaBuLa-LOGplus an der Technischen Universität Hamburg (TUHH) statt, um über die Schritte zur Erreichung der Projektziele, Erwartungen der verschiedenen Interessengruppen an das Projektergebnis und strategische Fragen zur Ausrichtung des Projekts zu diskutieren.
TaBuLa-LOGplus ist nach TaBuLa-LOG bereits das zweite Nachfolgeprojekt von TaBuLa. Dabei hat TaBuLa-LOGplus die Entwicklung und den Testbetrieb einer smarten Leitstelle für automatisierte Transportroboter und Busse in der Stadt Lauenburg an der Elbe zum Ziel. Als ein neuer Aspekt in diesem Nachfolgeprojekt kommt der Einsatz und die Erforschung von KI hinzu, die lokal und in Echtzeit dem Transportroboter ‚Augen‘ verleiht, sowie die rationale Entscheidungsfindung im Hintergrund in der Leitstelle unterstützt.
Das Projekt TaBuLa-LOGplus ist auf eine Laufzeit von über zwei Jahren, vom 01.04.2022 bis zum 30.06.2024, angelegt und wird durch das Bundesministerium für Digitales und Verkehr im Rahmen der Förderrichtlinie „Ein zukunftsfähiges, nachhaltiges Mobilitätssystem durch automatisiertes Fahren und Vernetzung“ mit 2,34 Millionen Euro gefördert.
Das Projekt wird von den Partnern TUHH mit dem Institut für Technische Logistik (ITL) und dem Institut für Verkehrsplanung und Logistik (VPL) sowie den Unternehmen Palaimon GmbH und Interlink GmbH getragen. Als assoziierte Partner sind der Kreis Herzogtum Lauenburg, die Stadt Lauenburg an der Elbe, Yunex Traffic (Ausgliederung Siemens) und KION Group beteiligt.
Alle weiteren Details finden Sie in der Pressemitteilung: 2022-06-03_TaBuLa-LOGplus_Pressemitteilung_Auftakt_FIN
